Статья предназначена для начинающих разработчиков, планирующих применять платы Ардуино для измерения аналоговых сигналов.
Можно почитать предыдущие статьи Введение в балансировку роторов и Практическое применение преобразования Фурье для анализа сигналов. Введение для начинающих
Измерение вибросигналов при балансировке роторов.

Под сигналом вибрации будет пониматься аналоговый сигнал с датчика вибрации - это может быть датчик-виброакселерометр, датчик виброскорости или виброперемещения.
При вращении ротора на каждый элемент объема действует центробежная сила. Если ротор сбалансирован, то каждому элементу объема ротора можно поставить в соответствие симметричный ему элемент, на который действует центробежная сила равная по величине, но противоположного знака. Таким образом суммарная центробежная сила равна нулю. Если ротор не сбалансирован, то имеется некая “лишняя” “тяжелая точка” и действующая на нее центробежная сила не компенсируется. Задача балансировки состоит в том, чтобы по результатам измерения вибрации вычислить массу и место (угол) установки корректирующего груза, который уравновесит “тяжелую точку”. Или двух грузов, которые будут компенсировать момент от двух тяжелых точек, разнесенных по длине ротора (так называемая динамическая балансировка).
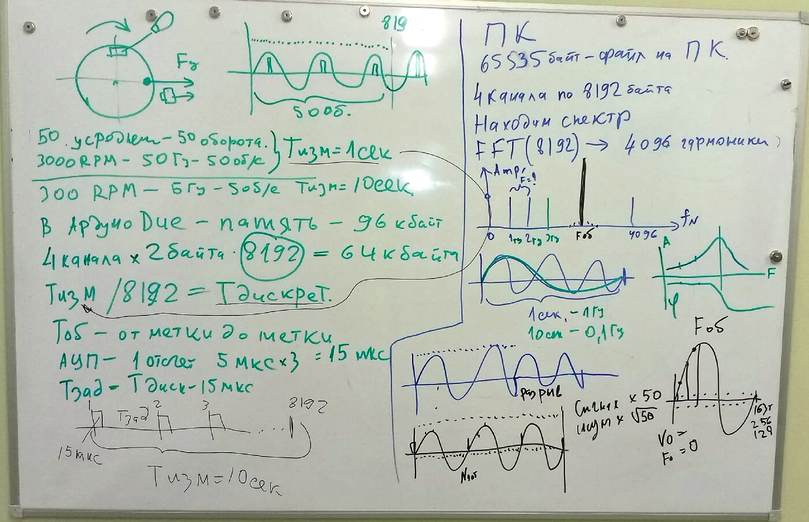
Центробежная сила от “тяжелой точки”, которая вызывает вибрацию ротора, меняет свое направление синхронно с частотой вращения ротора. При этом сигнал вибрации от дисбаланса имеет примерно синусоидальную форму и частота этой синусоиды равна частоте вращения ротора. Эту вибрацию называю “оборотной” или “1х” вибрацией. Поэтому при измерении необходимо выделить из общей вибрации машины сигнал вибрации на частоте вращения ротора и определить его амплитуду и фазу. Фаза определяется относительно метки на роторе, обычно используют светоотражающую ленту и лазерный датчик, который выдает импульс каждый раз, когда метка проходит через луч, то есть один раз за оборот.
Для более точного измерения амплитуды и фазы оборотной (1х) вибрации на фоне помех обычно проводят измерения на нескольких оборотах ротора с последующим синхронным усреднением, то есть отсчеты по каждому обороту складываются друг с другом. При синхронном усреднении выборка данных осуществляется синхронно с вращением ротора используя сигналы (импульсы) синхронизации от тахометра. Значения сигнала, соответствующие одной и той же фазе движения ротора, суммируются, а затем полученный результат делится на число усредняемых реализаций. При этом отношение сигнал\шум увеличивается в корень из N раз, где N - количество усреднений (оборотов).
Помимо сигналов датчиков вибрации, требуется синхронно с ними сохранять сигнал отметчика оборотов (тахометра). Это необходимо для того, чтобы при изменении частоты вращения в процессе измерения, была возможность выделить из общего массива отсчеты, относящиеся к конкретному обороту.
Таким образом для определения амплитуды и фазы оборотной вибрации с требуемой точностью необходимо произвести измерение вибрации на нескольких оборотов ротора за какое-то приемлемое время. Частоты вращения многих роторов в основном лежат в пределах от 1000 об\мин до 6000 об\мин, то есть примерно от 15 до 100 Гц. Например если ротор вращается с частотой 3000 об\мин (50 Гц), то время измерения 100 об составит 2 сек. При этом отношение сигнал\шум можно увеличить в 10 раз. Однако для 1000 об\мин (17 Гц) время измерения составит уже около 6 сек. Это еще терпимо. Но некоторые низкоскоростные ротора вращаются с частотой 300 об\мин - 5 Гц. Время измерения в этом случае будет уже 20 сек. Это долго. Поэтому пользователь должен иметь возможность задавать длительность измерений и, соответственно, число оборотов ротора для накопления в зависимости от частоты вращения ротора.
Также выглядит разумным предположение, что для разрешения по фазе лучше 1º необходимо иметь как минимум 360 отсчетов АЦП на 1 оборот.Правда с учетом того, что при обработке сигнала применяется синхронное усреднение по оборотам, это требование видимо будет значительно мягче. Этот вопрос попытаюсь более подробно осветить в следующей статье. Пока положим что 128 или 256 отсчетов на оборот будет достаточно.
Измеренные данные будем хранить в ОЗУ платы Arduino Due. Объем SRAM платы Arduino Due составляет 96 кб, разрядность АЦП 12 бит. Для хранения 12-битных отсчетов АЦП будем использовать одномерный массив типа uint16_t - 2 байта (16 бит).
Исторически так сложилось ( в нашем случае) что для измерения задействуется 4 канала АЦП - сигналы снимаются с двух датчиков вибрации, тахометра, и один пустой (резервный) отсчет. На самом деле не требуется задействовать 4 канала АЦП, достаточно двух каналов датчиков вибрации, а сигнал с тахометра можно хранить, например, в старших битах отсчетов АЦП, поскольку АЦП выдает 12 разрядные значения, а в массиве uint16_t можно хранить 16-разрядные.
Итого объем данных у нас составит 4 канала* 2 байта * 128 отсчетов на оборот * 64 оборота = 65536 байт. Этот объем целиком помещается в ОЗУ 96 кб. Если мы установим 128 отсчета на оборот, тогда можно вместить 64 оборотов в эти 64 кб данных. Таким образом объем выборки составляет 8192 отсчета, то есть 2 в 12 степени. Поэтому мы можем для вычисления спектра применить к этой выборке алгоритм БПФ (быстрое преобразование Фурье), который обычно работает со входным массивом объемом степени 2. В этой выборке укладывается несколько оборотов ротора. Выше мы задали, что на 1 оборот приходится, например, 128 отсчетов. Тогда в нашу выборку поместится 64 оборота ротора для последующего синхронного накопления.
Итак у нас объем данных всегда составляет 64 кб, теперь нам нужно рассчитать частоту дискретизации, таким образом, чтобы на определенной частоте вращения ротора данные измерений укладывались в эти 64 кб. Значит частота дискретизации должна меняться в зависимости от частоты вращения ротора и заданных пользователем настроек.
Частота вращения ротора измеряется тахометром, который выдает один импульс на каждый оборот ротора, когда светотражающая метка на роторе пересекает луч (синие импульсы на рисунке ниже).
Чтобы определить длительность одного оборота измеряем время между двумя импульсами тахометра. Импульсы с тахометра подаем на цифровой пин, к которому привязано прерывание, например, по спаду импульса.
#define RPMpin 3 // номер пина, на который подан отметчик
...
//******************
void RPM ()
{
flMetka = 1; // по прерыванию устанавливаем флаг
}
attachInterrupt(RPMpin, RPM, FALLING); //прерывание по спаду
...
timeB = micros(); //время начала ожидания метки (импульса тахометра). Если нет меток, то будем выходить из ожидания по таймеру
//------- ждем первую метку ---------------
// flMetka выставляется в 1 по прерыванию по приходу спада от отметчика
flMetka = 0; //сбрасываем флаг
do
{
if (flMetka == 1 || micros() > timeB + 1500000) break; //если меток нет, ждем полторы секунды и выходим
}
while (flMetka == 0);
timeM1 = micros(); // запоминаем время прихода первой метки
//------- ждем вторую метку ---------------
flMetka = 0;
do
{
if (flMetka == 1 || micros() > timeB + 1500000) break; // ждем полторы секунды высокого уровня на отметчике
}
while (flMetka == 0);
timeM2 = micros();
Tob = timeM2 - timeM1; //время между метками оборотов
Итак, мы знаем длительность одного оборота ротора Tob мкс. Пусть NPOb - это количество отсчетов на 1 оборот. У нас выше задано NPOb=128 отсчетов на 1 оборот, таким образом расчетная частота дискретизации составит NPOb/Tob. (На самом деле частота вращения ротора не обязана быть постоянной, но наша схема некоторым образом будет работать, даже если частота вращения изменяется в широких пределах.)
Для получения отсчета АЦП будем использовать встроенную функцию analogRead(pinADC), здесь pinADC - номер канала АЦП. Они обозначаются как A0, A1 и т.д до A4 в нашем случае. Всего на плате Arduino Due 12 аналоговых входов (каналов АЦП), которые выведены на пины от A0 до A11. Каждый из этих каналов имеет разрешение 12 бит, что обеспечивает 4096 различных значений. Время преобразования с помощью функции analogRead() составляет примерно 5 мкс, то есть частота дискретизации для одного канала составит примерно 250 кГц. Можно использовать более быстрые варианты преобразования, но нам этого не нужно.
Таким образом зная требуемую частоту дискретизации NPOb/Tob, мы можем рассчитать время между двумя отсчетами АЦП Nzad=Tob/NPOb - время между двумя отсчетами АЦП.
Заданная частота дискретизации обеспечивается при помощи функции
delayMicroseconds(Nzad - 15), где Nzad - расчетное время между отсчетами, магическое число 15 = 5 мкс*3 канала - время преобразования, которое вычитается из расчетной задержки.
Это решение может показаться примитивным, но для нас оно достаточно.
#define NPnt 8192
uint16_t Z1000[NPnt * 4]; // массив на NPnt=8192 отсчета *4 канала *2 байта
....
while (pnt < NPnt)//перебираем по отсчетам
{
Z1000[j + 0] = analogRead(A0); //Запись данных 1 канала в массив
Z1000[j + 1] = analogRead(A1); //Запись данных 2 канала в массив
Z1000[j + 2] = analogRead(A4); //Запись в массив 3 кан - отметчик
Z1000[j + 3] =0; // пустой отсчет
j = j + 4;
pnt++;
delayMicroseconds(Nzad - 15); // pauses microseconds
}Далее массив отсчетов передается в ПК, где происходит его дальнейшая обработка, хотя возможностей платы Arduino Due хватает, чтобы организовать обработку сигнала непосредственно в прошивке.
На самом деле за счет погрешностей функции delayMicroseconds, непостоянства частоты вращения ротора и прочих погрешностей число отсчетов, приходящееся на 1 оборот ротора не будет точно равно заданному - 128 или другому, равному степени 2. Поэтому перед вычислением спектра необходимо привести число отсчетов к степени 2, добавив или убрав недостающие\лишние отсчеты. Если допустим, вместо 128 отсчетов между метками у нас получилось 132, то мы убираем лишние. 132-128= 4 лишние точки. 132/4= 33. То есть убираем каждую 33 точку - 33, 66, 99, 132. В результате остается 128 точек. Если точек недостает, то действуем аналогично, только в нужном месте дублируем соседние точки. Или можно недостающую точку взять как среднее между соседними )
Таким образом в каждом обороте у нас оказывается ровно 128 точек и мы можем складывать эти массивы поточечно с целью дальнейшего усреднения.
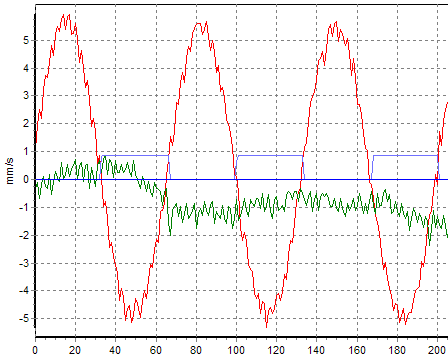
Проводя FFT над полученным массивом в результате мы получаем спектр практически без spectrum leakage, что видно на рисунке ниже.
Спектральная утечка (spectral leakage) — явление в цифровой обработке сигналов, при котором энергия спектральных компонентов сигнала «растекается» в соседние частотные отсчёты во время вычисления дискретного преобразования Фурье (DFT) или его эффективной реализации — быстрого преобразования Фурье (FFT). Это приводит к искажению оценённого спектра. Если период сигнала не соответствует длине окна наблюдения, разрывы на концах сигнала становятся более выраженными, усиливая утечку.

Для примера график спектра со спектральной утечкой. В данном случае измерение проводится без привязки к сигналам оборотов.

Таким образом, применение синхронного накопления и передискретизации сигнала к нужному числу отсчетов позволяет проводить измерения параметров вибросигнала с необходимой точностью и стабильностью.