🕒 阅读时间:3 分钟📝 字数:955👀 阅读量:Loading...
还记得我之前写的 友链图谱 - 汇聚千丝万缕的联系 吗?那时候还是 2D 平面的展示方式,虽然也能看出关系,但总觉得少了点什么。
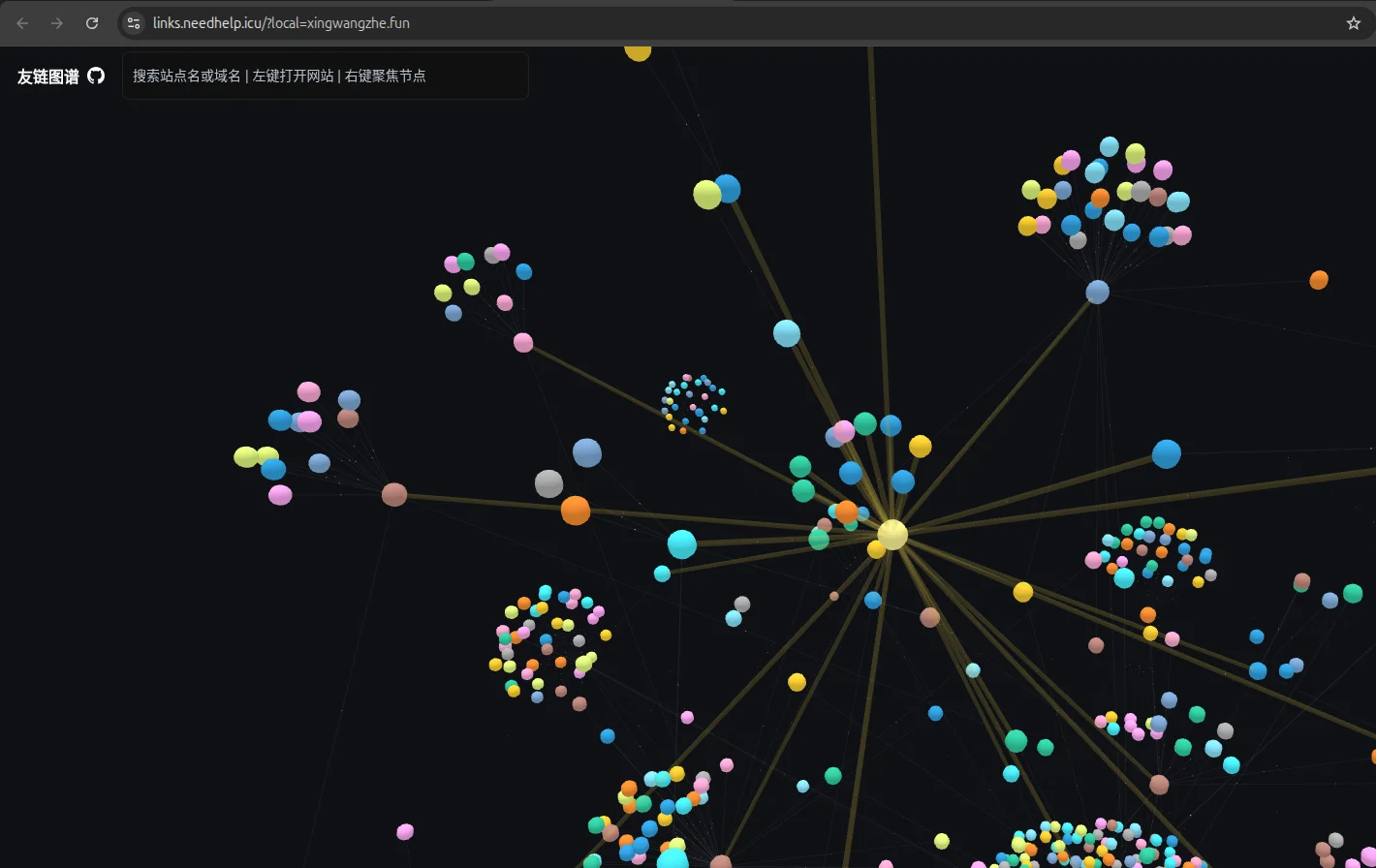
这次我彻底重构了可视化引擎,从 2D 升级到 3D 球状网络!基于 Three.js 和 3d-force-graph,让整个友链网络在三维空间中旋转、缩放,视觉效果直接拉满。
声明:本文在撰写过程中使用了 AI 工具辅助润色与排版。
友链图谱网址: https://links.needhelp.icu/
Github: https://github.com/xingwangzhe/FriendLinks

友链关系以 3D 球状网络 呈现,基于 Three.js 渲染:
| 特性 | 说明 |
|---|---|
| 鼠标拖拽 | 可旋转视角 |
| 滚轮缩放 | 自由探索网络 |
| 方向粒子流动 | 连线带粒子流动,直观展示友链指向 |
| 节点大小 | 反映链接数量(度数越大节点越大) |
| 暗色/亮色主题 | 自动切换 |
右键点击任意节点,会触发 聚焦效果:
| 效果 | 说明 |
|---|---|
| 节点放大 1.5 倍 | 聚焦节点半径放大,一眼就能找到 |
| 节点颜色调亮 60% | 高亮显示,周围节点保持原色 |
| 连线金色高亮 | 相连连线变为亮金色(2.5 倍粗、高不透明) |
| 相机自动移动 | 将节点移动到视野中心 |
从宏观宇宙中看,聚焦节点就像一颗 恒星,金色连线像光束一样指向它,非常醒目。
| 交互 | 说明 |
|---|---|
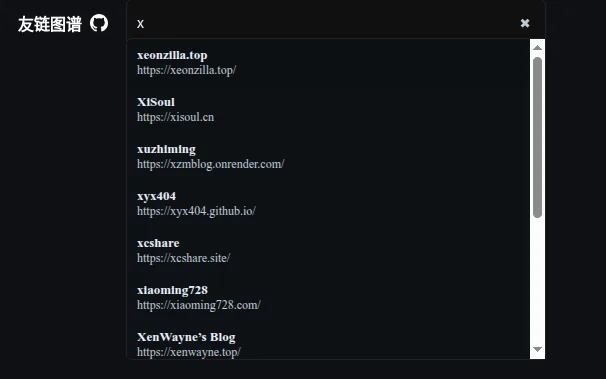
| 顶部搜索框 | 支持模糊搜索站点名、域名 |
| 左键点击节点 | 在新标签页打开对应网站 |
| 右键点击节点 | 聚焦该节点(相机拉近 + 高亮) |
| 悬停节点 | 显示站点名称、描述和链接 |
如果你已经在网络中,可以通过查询参数来自动聚焦并高亮指定站点节点:
| 匹配方式 | 示例 URL |
|---|---|
| 域名匹配 | https://links.needhelp.icu/?local=xingwangzhe.fun |
| 完整 URL | https://links.needhelp.icu/?local=https://xingwangzhe.fun |
flowchart TD
A[links/*.yml 站点数据] --> B[解析节点与友链]
B --> C[nodes: 站点 + 外部友链]
B --> D[links: 互链 / 单向友链]
C --> E[初始球面位置]
E --> F[forceSimulation 3D]
D --> F
F --> G[forceLink 弹簧力]
F --> H[forceManyBody 库仑斥力]
F --> I[forceCenter 质心归零]
F --> J{迭代 300 ticks}
J --> K[alpha 冷却]
J --> L[velocity 衰减]
K --> M[更新位置]
L --> M
M --> J
J --> N[输出 graph.json]
使用 d3-force-3d 在构建时预计算节点位置,客户端直接加载预计算好的坐标,开箱即用,无需等待布局收敛。
各步骤的数学细节:
| 步骤 | 输入 | 公式 |
|---|---|---|
| 初始位置 | 节点索引 ii | x=sin(i)⋅200, y=cos(1.3i)⋅200, z=sin(0.7i)⋅200x = \sin(i) \cdot 200,\ y = \cos(1.3i) \cdot 200,\ z = \sin(0.7i) \cdot 200 |
| Link 力 | 节点对距离 dd | F=∣d∣−40∣d∣⋅α⋅SF = \frac{|d| - 40}{|d|} \cdot \alpha \cdot S |
| Many-body 力 | 节点对距离 dd | F=−60⋅α∣d∣2F = \dfrac{-60 \cdot \alpha}{|d|^2},Barnes-Hut 近似加速 |
| Center 力 | 全体质心 pˉ\bar{p} | 反向平移使 pˉ→(0,0,0)\bar{p} \to (0, 0, 0) |
| alpha 冷却 | 当前 α\alpha | α←0.98α\alpha \gets 0.98\alpha(对应 .alphaDecay(0.02)) |
| velocity 衰减 | 当前速度 vv | v←0.7vv \gets 0.7v(对应 .velocityDecay(0.3)) |
研究本地仓库
src/pages/graph.json.ts时发现:当前调用forceSimulation(simNodes)没有传入维度参数,d3-force-3d默认是 2D 仿真。若要真正在三维空间计算z坐标,需要改为forceSimulation(simNodes, 3)。
| 属性 | 值 |
|---|---|
| 几何体 | SphereGeometry(球体,8 段细分) |
| 材质 | MeshLambertMaterial(Lambert 漫反射,有光照阴影) |
| 不透明度 | 1.0(完全不透明) |
| 尺寸 | 基于节点度数动态计算 |
| 状态 | 节点颜色 | 连线颜色 | 连线宽度 |
|---|---|---|---|
| 聚焦 | 调亮 60% | 亮金色 0.95 | 2.5 |
| 悬停 | 调亮 40% | 白色/灰色 0.5 | 0.4 |
| 高亮组 | 调亮 20% | 淡色 0.3 | 0.4 |
| 默认 | 原色 | 淡色 0.08 | 0.4 |
和之前一样简单,fork 仓库,在 links 文件夹下用你的域名作为文件名创建 yml 文件:
site:
name: 我的博客
description: 分享编程和技术相关的文章
url: https://example.com
friends:
- name: 编程小站
url: https://codehub.example.com
- name: 技术前沿
url: https://techfrontier.example.com
从 2D 到 3D,从平面到立体,友链图谱的升级不仅仅是视觉上的提升,更是对 Web 本意 的回归——让信息在空间中有机地连接在一起。
欢迎访问 友链图谱 2.0,找到你的博客在宇宙中的位置!
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。