我给我们的服务器框架深度集成了一些可观测性的能力。使用 opentelemetry-cpp 作为接入层。 在指标方面,我们允许业务层自由地定制化指标上报和拉取,并以此实现策略控制。上报的时候有Pull模式接口(异步接口),也有Push模式接口(同步接口)。 为了减少 opentelemetry-cpp 内部的视图合并开销,性能最佳,我们尽量使用异步接口。 但是这种情况下由于 opentelemetry-cpp 内部存在后台Processor线程、Exporter线程等,指标的采集往往需要跨线程操作。 这就要求我们上报代码逻辑需要保证线程安全。
而要求所有逻辑代码保证线程安全,一方面对于深层次有复杂关系的数据,代码复杂度比较高,很容易出错;另一方面如果过多无脑加锁也会一种开销和资源浪费。 所以我尝试抽象了一组接口来屏蔽这个细节,让业务层可以无脑接入。
最早我们使用 opentelemetry-cpp 比较粗暴,直接调用同步接口。在上报量稍微大点的时候,因为频繁触发视图的属性比较和Merge计算,导致某些场景的CPU开销能占到 10%。 所以后来进行了一系列优化,第一步骤就是通过一些预统计,减少属性集比较和视图合并。然后采用异步接口上报。
大致的采集流程如下:
flowchart LR
subgraph PullExporter["Pull模式驱动器"]
direction LR
PPull("Prometheus Pull Exporter
(MetricReader)
【fa:fa-globe 外部请求触发】")
PEMR("PeriodicExportingMetricReader
【fa:fa-clock 定时器触发】")
end
subgraph PrometheusExporter["Prometheus和其他"]
direction LR
PPush("fa:fa-file-export Prometheus Push Exporter")
PFile("fa:fa-file-export Prometheus File Exporter")
OtherPushExporter("fa:fa-file-export 其他Push模式Exporter...")
end
subgraph OTLPExporter["OTLP"]
direction LR
OTLPGRPC("fa:fa-file-export OTLP gRPC Exporter")
OTLPHTTP("fa:fa-file-export OTLP HTTP Exporter")
OTLPFile("fa:fa-file-export OTLP File Exporter")
end
subgraph PushExporter["Push模式输出"]
direction TB
PrometheusExporter
OTLPExporter
end
subgraph Meters["多个指标"]
direction LR
Meter1("Meter 1")
Meter2("Meter 2")
Meter3("Meter 3")
Meter4("Meter ...")
end
classDef callback stroke:#f00
subgraph MeterCallbacks["指标回调(每个指标)"]
direction TB
Callback["Callback"]:::callback
ObservableRegistry["ObservableRegistry"]
end
subgraph SyncMeterAPI["同步指标接口(每个指标)"]
direction LR
Counter["fa:fa-paper-plane Counter"]
Gauge["fa:fa-paper-plane Gauge"]
Histogram["fa:fa-paper-plane Histogram"]
end
subgraph MetricStorageLayer["存储层(每个视图)"]
direction TB
SyncMetricStorage["fa:fa-layer-group 同步存储层"]
AsyncMetricStorage["fa:fa-layer-group 异步存储层"]
end
subgraph MeterCollect["采集层"]
MC("MetricCollector")
MetricProducer("MetricProducer")
Meters
MeterCallbacks
SyncMeterAPI
MetricStorageLayer
end
PullExporter -- 驱动触发采集 --> MetricProducer
MetricProducer --> MC
MC --> Meters
ObservableRegistry --> Callback
Meters --> MeterCallbacks
SyncMeterAPI --> MetricStorageLayer
MeterCallbacks --> MetricStorageLayer
MetricStorageLayer -- 通知指标提取 --> Meters
Meters -- Collect获取结果后 --> PushExporter
SyncMetricStorage@{ shape: lin-cyl}
AsyncMetricStorage@{ shape: lin-cyl}
但是异步接口调用有一定复杂度,一个最简单的注册指标的流程如下:
using otel_observer_result_int64 = opentelemetry::metrics::ObserverResultT<int64_t>;
using otel_observer_result_double = opentelemetry::metrics::ObserverResultT<double>;
auto meter = provider->GetMeter("meter name");
auto instrument = meter->CreateInt64ObservableGauge("instrument name", "instrument description", "instrument unit");
instrument->AddCallback([](opentelemetry::metrics::ObserverResult result, void* /*private_data*/) {
if (opentelemetry::nostd::holds_alternative<opentelemetry::nostd::shared_ptr<otel_observer_result_int64>>(result)) {
auto type_result = opentelemetry::nostd::get<opentelemetry::nostd::shared_ptr<otel_observer_result_int64>>(result);
if (type_result) {
type_result->Observe(static_cast<int64_t>(get_result_value()), {} /* attributes */);
}
} else if (opentelemetry::nostd::holds_alternative<opentelemetry::nostd::shared_ptr<otel_observer_result_double>>(result)) {
auto type_result = opentelemetry::nostd::get<opentelemetry::nostd::shared_ptr<otel_observer_result_double>>(result);
type_result->Observe(static_cast<double>(result_value), {} /* attributes */);
}
} /*, void* private_data*/);
这个接口有几个需要注意的地方:
由于最后一个Provider引用释放的时候,otel-cpp会自动调用一次Flush吧所有已经导出的数据强制刷出。这会导致线程Block,所以为了不影响业务主线程。这里还要处理一次Reload的时候另起线程来执行Flush。
using ObservableCallbackPtr = void (*)(ObserverResult, void *); 只能透传一个 void* ,如果要包装更复杂的数据透传需要自己封装。我们通过抽象了一层来一次性解决这些问题。每次业务层采集从缓存里读数据,并且底层直接处理掉类型转换。比如:
for (auto& record : metrics_item->collected_records) {
if (!record) {
continue;
}
++export_record_count;
if (opentelemetry::nostd::holds_alternative<
opentelemetry::nostd::shared_ptr<opentelemetry::metrics::ObserverResultT<int64_t>>>(result)) {
auto real_observer = opentelemetry::nostd::get<
opentelemetry::nostd::shared_ptr<opentelemetry::metrics::ObserverResultT<int64_t>>>(result);
if (real_observer) {
real_observer->Observe(get_opentelemetry_utility_metrics_record_value_as_int64(record->value),
opentelemetry_utility::get_attributes(record->attributes));
}
} else if (opentelemetry::nostd::holds_alternative<
opentelemetry::nostd::shared_ptr<opentelemetry::metrics::ObserverResultT<double>>>(result)) {
auto real_observer = opentelemetry::nostd::get<
opentelemetry::nostd::shared_ptr<opentelemetry::metrics::ObserverResultT<double>>>(result);
if (real_observer) {
real_observer->Observe(get_opentelemetry_utility_metrics_record_value_as_double(record->value),
opentelemetry_utility::get_attributes(record->attributes));
}
}
}
这里 metrics_item->collected_records 什么时候刷新呢?每次触发采集的时候,我们会检查采集版本号,当超出采集周期的时候会自增需要采集的版本号。
if (now - metrics_item->collected_timepoint > metrics_item->collect_interval) {
metrics_item->export_version.store(metrics_item->collect_version.load(std::memory_order_acquire),
std::memory_order_release);
callback_data_set.second.collecting_version.fetch_add(1, std::memory_order_release);
metrics_item->collected_timepoint = now;
std::lock_guard<std::recursive_mutex> collected_lock_guard{metrics_item->collected_lock};
metrics_item->collected_records.clear();
} else if (now < metrics_item->collected_timepoint) {
metrics_item->collected_timepoint = now;
}
然后外部Tick的时候,发现这个collecting_version大于导出数据版本的时候,才去触发用户层采集接口。 在多源抓取的时候,可能在一个采集周期内多次触发采集回调。这时候就能直接命中缓存,直接返回。
这里有个小细节是因为指标数量可能比较多,如果一帧里全量采集可能会导致卡顿。所以有必要在一次采集消耗过高时分针增量采集。 我们现在是以一个指标为单位,比如有2000个指标,采集200个就话费了比较长时间了,就让出时间片,下一个Tick从第201个开始。 这里也要限制每个Tick的采集量,尽可能公平调度,防止引起其他功能模块饥饿。
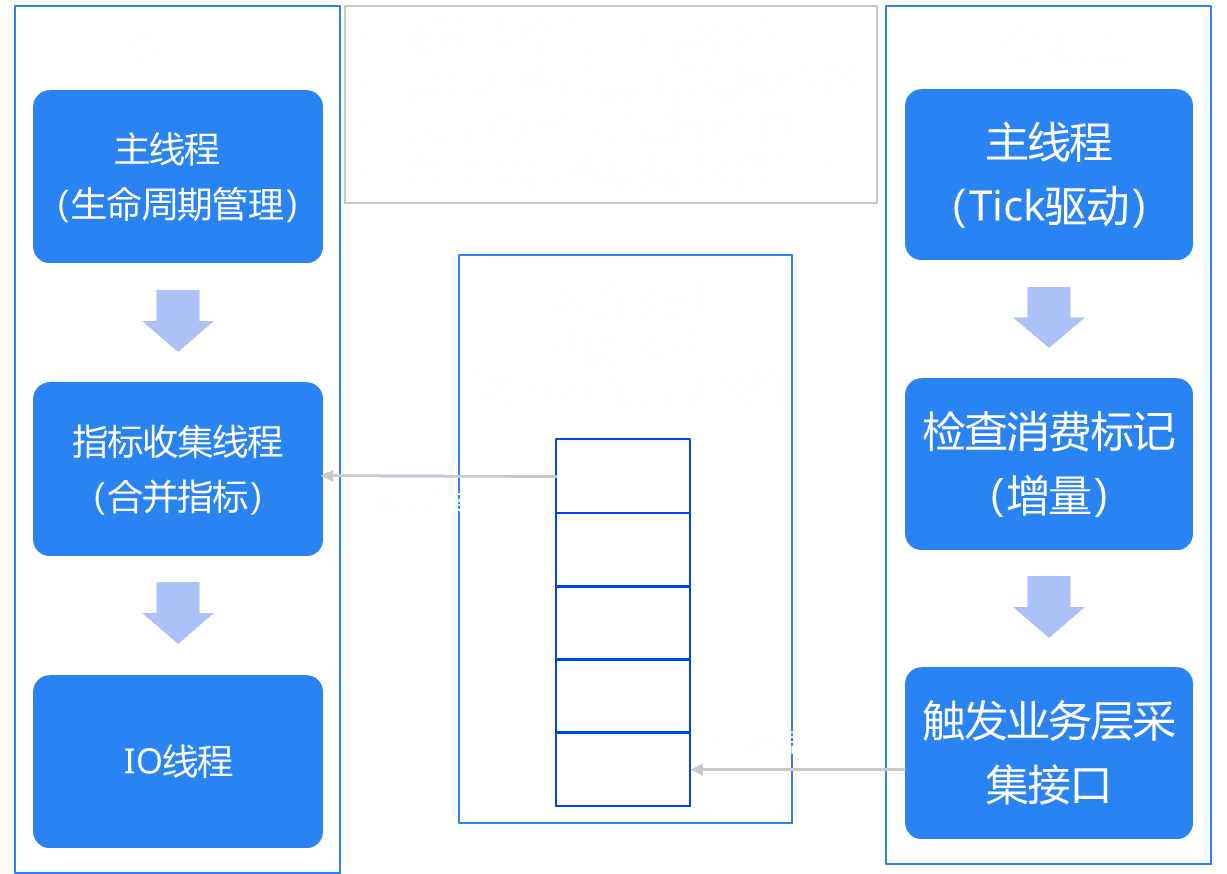
由于希望业务层不要关心线程安全的复杂性,所以我们的OTEL层采集在专门的采集线程上,但是业务层的采集总是在主线程执行。中间用无锁队列串起来,大致结构如下:
在Reload的时候,我们需要支持重新加载所有的配置资源、processor、exporter等组件。但是整个OTEL SDK里是没有移除接口的。整个处理组件和IO组件一旦搭配好就处于immutable状态。 那么为了实现Reload,最简单的方式就是从最上游开始,也就是从Provider层开始整个重建。这里涉及两个问题。
问题一:在创建完新Provider后,销毁前一个Provider时,会触发对正在导出的数据的Flush操作。这有可能是个延迟操作,会阻塞调用方。显然我们不能接受足额阻塞我们业务线程。 所以这里的解决方法就是创建一个专门的销毁线程。
std::shared_ptr<global_service_data_type> current_service_cache = get_global_service_data();
if (!current_service_cache) {
return;
}
// 我们的系统存在多分组,所以要处理一下默认分组和命名分组
std::shared_ptr<group_type> previous_group = group;
if (group->group_name.empty()) {
current_service_cache->default_group.swap(previous_group);
} else {
current_service_cache->named_groups[group->group_name].swap(previous_group);
}
// Shutdown in another thread to avoid blocking
do {
if (!previous_group || previous_group == group) {
break;
}
// 这里引用provider是为了续上provider的生命周期传给自线程内执行Flush,否则最后一个引用计数结束会立即执行Flush阻塞。
if (previous_group->logs_handle.provider == group->logs_handle.provider) {
previous_group->logs_handle.reset();
}
if (previous_group->metrics_handle.provider == group->metrics_handle.provider) {
previous_group->metrics_handle.reset();
}
if (previous_group->tracer_handle.provider == group->tracer_handle.provider) {
previous_group->tracer_handle.reset();
}
std::thread cleanup_thread([previous_group, current_service_cache]() {
// 子线程执行Flush和销毁操作,这里面是执行一些线程安全相关的设置和Flush
_opentelemetry_cleanup_group(previous_group, current_service_cache);
});
cleanup_thread.detach();
} while (false);
static void _opentelemetry_cleanup_group(std::shared_ptr<::mx::telemetry::group_type> group,
const std::shared_ptr<global_service_data_type> ¤t_service_cache) {
std::list<std::shared_ptr<std::thread>> shutdown_threads;
if (current_service_cache && group && group->initialized) {
atfw::util::lock::read_lock_holder<atfw::util::lock::spin_rw_lock> lock_guard{
current_service_cache->on_group_destroy_callback_lock};
for (auto &callback_fn : current_service_cache->on_group_destroy_callbacks) {
if (callback_fn) {
callback_fn(group);
}
}
group->initialized = false;
}
if (group) {
// Provider must be destroy before logger
{
atfw::util::lock::write_lock_holder<atfw::util::lock::spin_rw_lock> lock_guard{group->logger_lock};
if (group->logs_handle.provider) {
if (group->logs_handle.shutdown_callback) {
auto handle = group->logs_handle;
// 每个组件分别再在子线程内销毁,减少远端配置错误或者远端延迟导致累计延迟
shutdown_threads.push_back(
atfw::memory::stl::make_shared<std::thread>([handle]() { handle.shutdown_callback(handle.provider); }));
}
group->logs_handle.reset();
}
group->default_logger = opentelemetry::nostd::shared_ptr<opentelemetry::logs::Logger>();
}
// ...
}
// 这里是其中一个Shutdown回调的代码
ret.shutdown_callback =
[processors_ptr](const opentelemetry::nostd::shared_ptr<opentelemetry::trace::TracerProvider> &provider) {
if (!provider) {
return;
}
auto trace_provider = opentelemetry::trace::Provider::GetTracerProvider();
if (trace_provider == provider) {
opentelemetry::trace::Provider::SetTracerProvider(
opentelemetry::nostd::shared_ptr<opentelemetry::trace::TracerProvider>(
new opentelemetry::trace::NoopTracerProvider()));
}
// 处理优雅退出时无限等待的问题
if (processors_ptr && !processors_ptr->empty()) {
std::chrono::microseconds timeout =
std::chrono::duration_cast<std::chrono::microseconds>(std::chrono::seconds{10});
auto app = atapp::app::get_last_instance();
if (nullptr != app) {
timeout = std::chrono::duration_cast<std::chrono::microseconds>(
std::chrono::seconds{app->get_origin_configure().timer().stop_timeout().seconds() / 2});
timeout += std::chrono::duration_cast<std::chrono::microseconds>(
std::chrono::nanoseconds{app->get_origin_configure().timer().stop_timeout().nanos() / 2});
}
// 某些老版本Provider层调用Shutdown没有透传timeout到processor,会导致Flush时间过长。这里显示调用一次来解决
for (auto &processor : *processors_ptr) {
processor->Shutdown(timeout);
}
processors_ptr->clear();
}
static_cast<opentelemetry::sdk::trace::TracerProvider *>(provider.get())->Shutdown();
};
问题二:在重新创建后所有的指标监听都需要重建。我们有不希望把这个重复注册的复杂性暴露给用户层,所以底层做了另外一层缓存。在重建Provider之后也自动重新注册。
因为我们之前采集层面已经做了数据层缓存分离了,所以我们这里在那个缓存层之上顺便把注册也缓存了就行了。
SERVER_FRAME_API bool opentelemetry_utility::add_global_metics_observable_int64(
metrics_observable_type type, opentelemetry::nostd::string_view meter_name, meter_instrument_key metrics_key,
std::function<void(metrics_observer&)> fn) {
if (!fn) {
return false;
}
// opentelemetry only use metrics name as key of metric storage
std::string key = atfw::util::log::format("{}:{}", gsl::string_view{meter_name.data(), meter_name.size()},
gsl::string_view{metrics_key.name.data(), metrics_key.name.size()});
std::pair<std::recursive_mutex&, opentelemetry_utility_global_metrics_set&> data_set = get_global_metrics_set();
{
std::lock_guard<std::recursive_mutex> lock_guard{data_set.first};
auto iter = data_set.second.int64_observable_by_key.find(key);
if (data_set.second.int64_observable_by_key.end() != iter && iter->second) {
iter->second->callback = fn;
return true;
}
}
auto handle = atfw::memory::stl::make_shared<opentelemetry_utility::metrics_observer>();
if (!handle) {
return false;
}
handle->key = key;
handle->type = type;
handle->meter_name = static_cast<std::string>(meter_name);
handle->meter_instrument_name = static_cast<std::string>(metrics_key.name);
handle->meter_instrument_description = static_cast<std::string>(metrics_key.description);
handle->meter_instrument_unit = static_cast<std::string>(metrics_key.unit);
handle->collect_interval = protobuf_to_chrono_duration<>(
logic_config::me()->get_logic().telemetry().opentelemetry().metrics().reader().export_interval());
if (handle->collect_interval < std::chrono::seconds{2}) {
handle->collect_interval = std::chrono::seconds{15};
} else {
handle->collect_interval -= std::chrono::seconds{1};
}
handle->callback = std::move(fn);
handle->origin_callback = nullptr;
if (false == data_set.second.initialized.load(std::memory_order_acquire) ||
internal_add_global_metrics_observable_int64(*handle)) {
std::lock_guard<std::recursive_mutex> lock_guard{data_set.first};
data_set.second.int64_observable_by_key[key] = handle;
data_set.second.int64_observable_by_pointer[reinterpret_cast<void*>(handle.get())] = handle;
++data_set.second.collecting_version;
return true;
} else {
return false;
}
}
这里面 internal_add_global_metrics_observable_int64 是实际执行注册observable。Reload的时候重新调用一次就行了。
虽然我们的通信接口都是OTEL规范,但是有时候会上传到其他平台。比如目前指标领域的事实标准-Prometheus。
Prometheus 其实数据结构是比较简单的,比如指标名只允许 [a-zA-Z_:][a-zA-Z0-9_:]* 这个规范。只有一层标签的概念,标签名必须满足 [a-zA-Z_][a-zA-Z0-9_]* ,并且只有一层。
OTEL就复杂多了,指标的结构如下:
// MetricsData
// └─── ResourceMetrics
// ├── Resource
// ├── SchemaURL
// └── ScopeMetrics
// ├── Scope
// ├── SchemaURL
// └── Metric
// ├── Name
// ├── Description
// ├── Unit
// └── data
// ├── Gauge
// ├── Sum
// ├── Histogram
// ├── ExponentialHistogram
// └── Summary
里面的属性结构更加复杂:
// Metric
// +------------+
// |name |
// |description |
// |unit | +------------------------------------+
// |data |---> |Gauge, Sum, Histogram, Summary, ... |
// +------------+ +------------------------------------+
//
// Data [One of Gauge, Sum, Histogram, Summary, ...]
// +-----------+
// |... | // Metadata about the Data.
// |points |--+
// +-----------+ |
// | +---------------------------+
// | |DataPoint 1 |
// v |+------+------+ +------+ |
// +-----+ ||label |label |...|label | |
// | 1 |-->||value1|value2|...|valueN| |
// +-----+ |+------+------+ +------+ |
// | . | |+-----+ |
// | . | ||value| |
// | . | |+-----+ |
// | . | +---------------------------+
// | . | .
// | . | .
// | . | .
// | . | +---------------------------+
// | . | |DataPoint M |
// +-----+ |+------+------+ +------+ |
// | M |-->||label |label |...|label | |
// +-----+ ||value1|value2|...|valueN| |
// |+------+------+ +------+ |
// |+-----+ |
// ||value| |
// |+-----+ |
// +---------------------------+
那为什么要这么复杂呢? 我们举例一个场景,比如我们自己接入了指标上报,我们依赖的gRPC或者其他第三方组件也接入了可观测性。 那么怎么保证我们的上报点不冲突?这可以通过不同的Scope来区分。 然后同样在一个进程里,上报的数据会包含比如host信息,进程名字、业务类型等等和进程相关的信息。但是我们有2000个指标,那么用原始的 Prometheus 我们不得不把这些信息重复上报 2000 份。 而在OTEL里,只要在Resource去上报一次就行了。同理还有指标级共享和每个Point不同的数据区,也是能减少不必要的重复上报。
实际上对于进程级资源共享,Prometheus 和 OpenCensus 都有一个方案。定义了一个 target_info 类型的特殊指标来承载这些信息。 同一个连接,target_info 只要上报一次即可。后面上报的指标自动关联这些属性。但是这个并不是所有平台都兼容,将具体是否可用还要咨询使用的平台。 有兴趣可以阅读 https://opentelemetry.io/docs/specs/otel/compatibility/prometheus_and_openmetrics/#resource-attributes-1
这里涉及数据标签的问题。另外,规范里还定义了一些特殊的单位转换,比如:
// Time
{"d", "days"},
{"h", "hours"},
{"min", "minutes"},
{"s", "seconds"},
{"ms", "milliseconds"},
{"us", "microseconds"},
{"ns", "nanoseconds"},
// Bytes
{"By", "bytes"},
{"KiBy", "kibibytes"},
{"MiBy", "mebibytes"},
{"GiBy", "gibibytes"},
{"TiBy", "tibibytes"},
{"KBy", "kilobytes"},
{"MBy", "megabytes"},
{"GBy", "gigabytes"},
{"TBy", "terabytes"},
{"By", "bytes"},
{"KBy", "kilobytes"},
{"MBy", "megabytes"},
{"GBy", "gigabytes"},
{"TBy", "terabytes"},
// SI
{"m", "meters"},
{"V", "volts"},
{"A", "amperes"},
{"J", "joules"},
{"W", "watts"},
{"g", "grams"},
// Misc
{"Cel", "celsius"},
{"Hz", "hertz"},
{"1", ""},
{"%", "percent"}
比如我们定义的一个OTEL的指标为 {name="abc", description="XXX", unit="%"} ,最后输出的 Prometheus 指标名是 abc_percent 。
这些规则还在演进变化中,另外早期的OTEL-CPP SDK有个BUG,没有设置单位的属性多余输出了下划线。
比如 {name="abc", description="XXX", unit=""} 对应的 Prometheus 指标名应该是 abc, 但是早期版本会使用 abc_ 。
那为了抹平拉取聚合这一侧用户使用的复杂性,我们抽象了 SanitizePrometheusName 接口,保持和OTEL-CPP里一样的转换规则。
而提取指标名则是搞了个“奇技淫巧”,先创建一个虚假的指标。执行一次OTEL里的指标转换,在提取生成的指标名。代码如下:
opentelemetry::sdk::metrics::ResourceMetrics fake_resource_metrics;
opentelemetry::sdk::metrics::MetricData fake_metrics_data;
opentelemetry::sdk::metrics::PointDataAttributes fake_point_data;
auto fake_scope = opentelemetry::sdk::instrumentationscope::InstrumentationScope::Create("none");
fake_metrics_data.aggregation_temporality = opentelemetry::sdk::metrics::AggregationTemporality::kCumulative;
fake_metrics_data.instrument_descriptor.name_ = metrics_name_;
fake_metrics_data.instrument_descriptor.description_ = metrics_description_;
fake_metrics_data.instrument_descriptor.unit_ = metrics_unit_;
fake_metrics_data.instrument_descriptor.value_type_ = opentelemetry::sdk::metrics::InstrumentValueType::kLong;
// @see OtlpMetricUtils::GetAggregationType in otel-cpp
switch (metrics_type_) {
case PROJECT_NAMESPACE_ID::config::EN_HPA_POLICY_METRICS_TYPE_COUNTER: {
fake_metrics_data.instrument_descriptor.type_ = opentelemetry::sdk::metrics::InstrumentType::kObservableCounter;
fake_point_data.point_data = opentelemetry::sdk::metrics::SumPointData{};
break;
}
default: {
fake_metrics_data.instrument_descriptor.type_ = opentelemetry::sdk::metrics::InstrumentType::kObservableGauge;
fake_point_data.point_data = opentelemetry::sdk::metrics::LastValuePointData{};
break;
}
}
fake_metrics_data.point_data_attr_.push_back(fake_point_data);
#if OPENTELEMETRY_VERSION_MAJOR * 1000 + OPENTELEMETRY_VERSION_MINOR >= 1012
fake_resource_metrics.scope_metric_data_.push_back(
{fake_scope.get(), std::vector<opentelemetry::sdk::metrics::MetricData>{fake_metrics_data}});
#else
fake_resource_metrics.scope_metric_data_.push_back({fake_scope.get(), {fake_metrics_data}});
#endif
#if OPENTELEMETRY_VERSION_MAJOR * 1000 + OPENTELEMETRY_VERSION_MINOR < 1012
auto prometheus_family =
opentelemetry::exporter::metrics::PrometheusExporterUtils::TranslateToPrometheus(fake_resource_metrics);
#else
auto prometheus_family =
opentelemetry::exporter::metrics::PrometheusExporterUtils::TranslateToPrometheus(fake_resource_metrics, false);
#endif
最终我们提供给用户层的配置大概是这样。
- metrics_name: "ds_fps_gauge"
metrics_unit: us
metrics_description: "DS Runtime Fps Metrics"
metrics_type: gauge
aggregation: count
aggregation_parameter:
by:
labels:
- region_group
- StandAlone
simple_function:
- last_over_time: 1m
selectors:
"PlayerInit": "true"
"service_name": "DsMonitor"
without_auto_selectors:
- service_name
- hpa_target_name
- metrics_name: "product_sales_order"
metrics_unit: count
metrics_description: "OrderSvr Product Sales Order Count"
metrics_type: gauge
aggregation: sum
aggregation_parameter:
by:
labels:
- area_code
- market_id
- product_id
simple_function:
- last_over_time: 1m
without_auto_selectors:
- service_name
- hpa_target_name
受Grafana的启发,我们也提供了一些基础的函数包装和聚合转换,并且自动注入一些聚合标签来做多环境隔离,避免用户直接配置PromQL,防止出错的可能性。
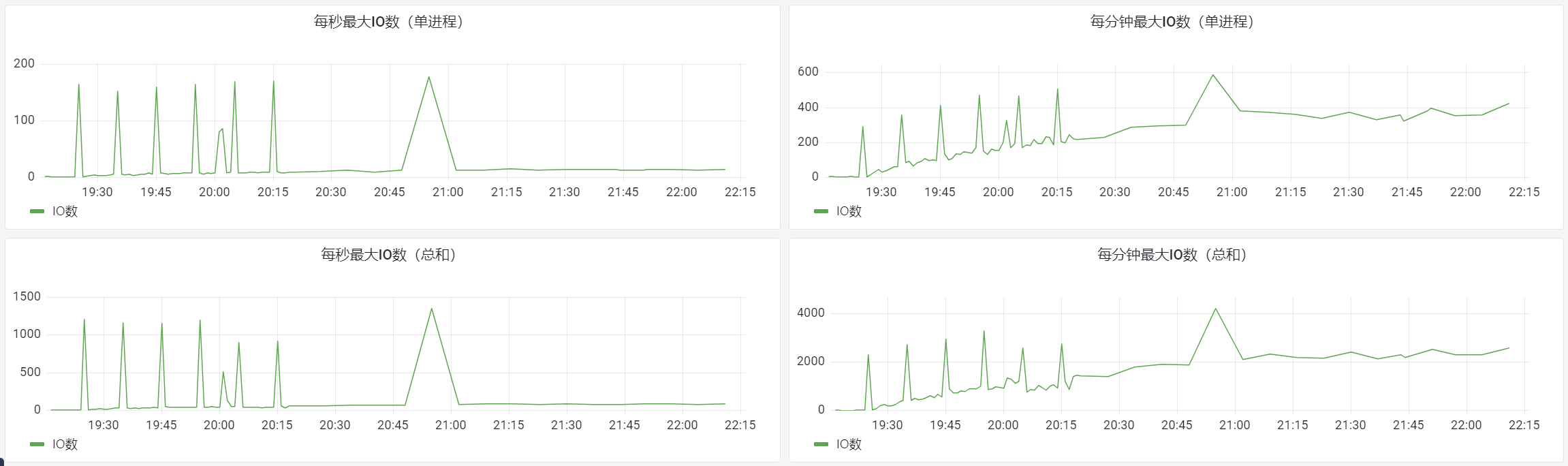
最后,我们提供给使用者一方的的指标接口就相当简单,比如交易行服务的IO毛刺监控:
// 一秒内IO数
rpc::telemetry::opentelemetry_utility::add_global_metics_observable_int64(
rpc::telemetry::metrics_observable_type::kGauge, "trade_order", {"trade_order_second_max_io_count", "", ""},
[](rpc::telemetry::opentelemetry_utility::metrics_observer& result) {
if (global_order_manager::is_instance_destroyed()) {
return;
}
metrics_global_data& metrics_data = global_order_manager::me()->metrics_data_;
int64_t value = metrics_data.second_max_io_count.load(std::memory_order_acquire);
metrics_data.second_max_io_count.store(metrics_data.second_current_max_io_count, std::memory_order_release);
rpc::telemetry::opentelemetry_utility::global_metics_observe_record(result, value);
});
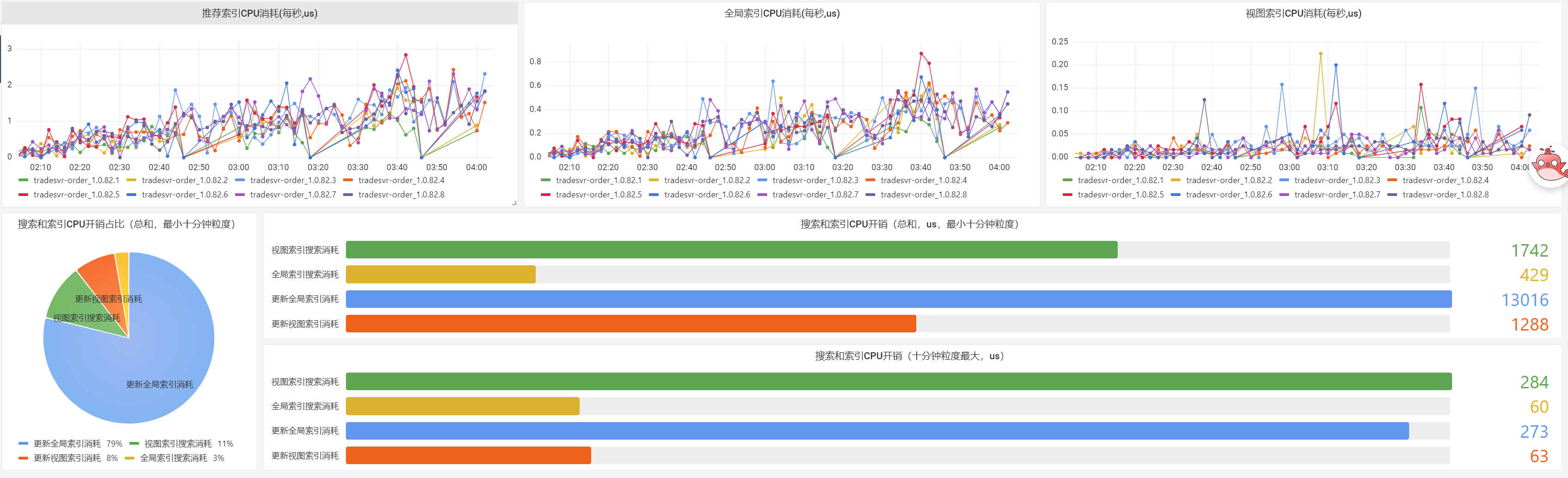
再展示个更复杂的动态多层级指标:
// 更新视图索引索引CPU消耗
rpc::telemetry::opentelemetry_utility::add_global_metics_observable_int64(
rpc::telemetry::metrics_observable_type::kGauge, "trade_order", {"trade_order_slot_distribution", "", ""},
[](rpc::telemetry::opentelemetry_utility::metrics_observer& result) {
if (global_order_manager::is_instance_destroyed()) {
return;
}
std::shared_ptr<::rpc::telemetry::group_type> lifetime;
for (auto& area_data : global_order_manager::me()->metrics_data_.area_metric_data) {
if (!area_data.second) {
continue;
}
for (auto& order_type_data : area_data.second->order_type_metric) {
if (!order_type_data.second) {
continue;
}
for (auto& slot_dist : order_type_data.second->slot_distribution) {
rpc::telemetry::trace_attribute_pair_type internal_attributes[] = {
{"trade_area_code", area_data.first},
{"trade_order_type", order_type_data.first},
{"trade_order_slot_id", slot_dist}};
rpc::telemetry::opentelemetry_utility::global_metics_observe_record_extend_attrubutes(
result, 1, lifetime, internal_attributes);
}
}
}
});
可观测性领域还有很多其他的优化和探索,后面有空慢慢分享吧。 也欢迎有兴趣的小伙伴们互相交流探讨。
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。