功能:创建功能包,创建时指定包名、编译方式、依赖项等
格式:ros2 pkg create --build-type <ament_python> <pkg_name>
ros2 pkg create : 创建包的指令
build-type:功能包编译方式,ament_python表示Python;ament_cmake表示C++或C
pkg_name:包名
rclpy std_msgs:依赖项
功能:查看系统中功能包列表
格式:ros2 pkg list

功能:查看包内可执行文件列表
格式:ros2 pkg executables <pkg_name>
pkg_name表示功能包名称

功能:运行功能包节点程序
格式:ros2 run <pkg_name> <node_name>
pkg_name表示功能包名称
node_name表示节点名称

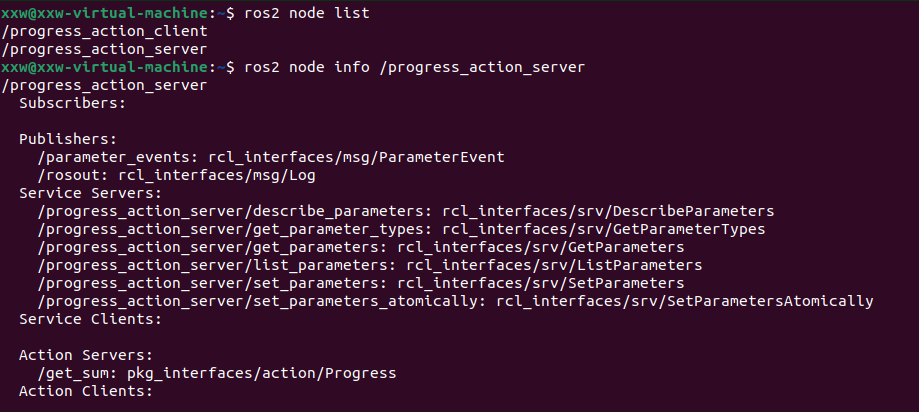
功能:查询当前域内节点列表
格式:ros2 node list

功能:查看节点详细信息,包括订阅、发布的消息,开启的服务或动作等
格式:ros2 node info <node_name>
node_name表示节点名称
功能:查看当前域内的所有话题
格式:ros2 topic list

功能:显示话题消息类型,订阅者/发布者数量
格式:ros2 topic info <topic_name>
topic_name表示话题名称

功能:查看话题的消息类型
格式:ros2 topic type <topic_name>
topic_name表示话题名称

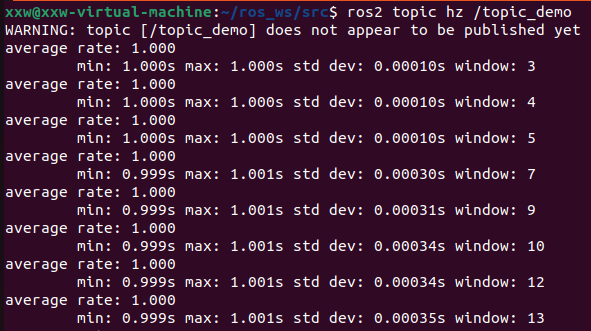
功能:查看话题平均发布频率
格式:ros2 topic hz <topic_name>
topic_name表示话题名称
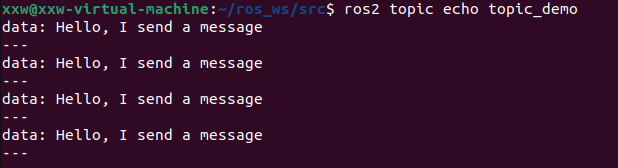
功能:打印话题消息,相当于一个订阅者
格式:ros2 topic echo <topic_name>
topic_name表示话题名称
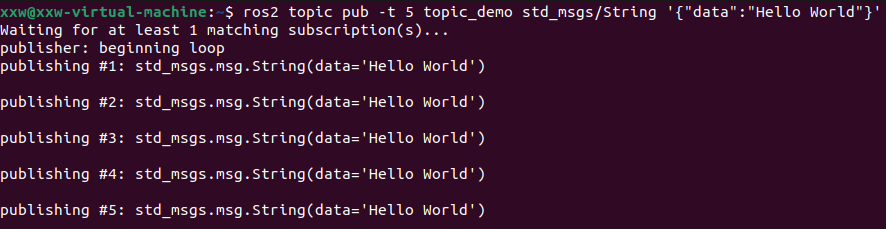
功能:在终端发布指定话题消息
格式:ros2 topic pub <topic_name> <message_type> <message_content>
topic_name表示话题名称
message_type表示话题数据类型
message_content表示话题消息内容
默认是以1Hz的频率循环发布,可以设置以下参数:
参数-1只发送一次 :ros2 topic pub -1 topic_name messge_type message_content
参数-t count循环发送count次: ros2 topic pub -t count topic_name messge_type message_content
参数-r count以count Hz的频率循环发送: ros2 topic pub -r count topic_name messge_type message_content
如下案例循环发送5次到话题 topic_demo中,类型为std_msgs/String,类型为json格式字符串Hello World
功能:查询当前系统的所有接口,包括话题、服务、动作
格式:ros2 interface list
功能:查看指定接口的详细信息
格式:ros2 interface show <interface_name>
interface_name表示接口名称

功能:查看当前域内所有的服务
格式:ros2 service list
功能:调用指定服务
格式:ros2 service call <service_name> <service_type>
service_name:调用的服务名
service_type:服务数据类型
arguments:服务传入参数
调用加法服务传入参数a和参数b,得到结果sum

此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。