机器人是一个复杂的智能系统,并不仅仅是键盘遥控运动、识别某个目标这么简单,我们需要实现的是送餐、送货、分拣等满足具体场景需求的机器人。在这些应用功能的实现中,另外一种ROS通信机制也会被常常用到——那就是动作。
从这个名字上就可以很好理解这个概念的含义,这种通信机制的目的就是便于对机器人某一完整行为的流程进行管理。
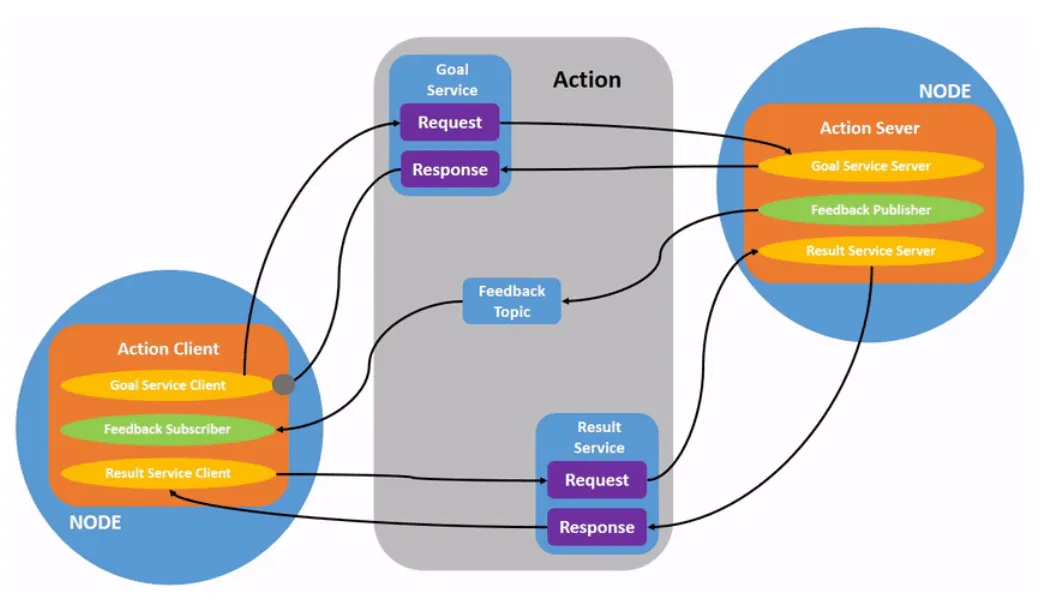
动作通讯是一种带有连续反馈的通讯模型,在通讯双方中,客户端发送请求数据到服务端,服务端响应结果给客户端,但是在服务端接收到请求产生最终响应的过程中,会发送连续的反馈信息给客户端。
客户端发送一个运动的目标,想让机器人动起来,服务器端收到之后,就开始控制机器人运动,一边运动,一边反馈当前的状态。
如果是一个导航动作,这个反馈可能是当前所处的坐标,如果是机械臂抓取,这个反馈可能又是机械臂的实时姿态。
动作通讯客户端/服务器模型如下:
功能如下:动作客户端提交一个整数类型num,动作服务器接收请求数据并累加1-num之间的所有整数,将最终结果返回给客户端,且每次累计计算后将当前结果返回给客户端
cd ~/ros_ws/src ros2 pkg create --build-type ament_cmake pkg_interfaces
int64 num --- int64 sum --- float64 progress
<buildtool_depend>rosidl_default_generators</buildtool_depend> <depend>action_msgs</depend> <member_of_group>rosidl_interface_packages</member_of_group>
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"action/Progress.action"
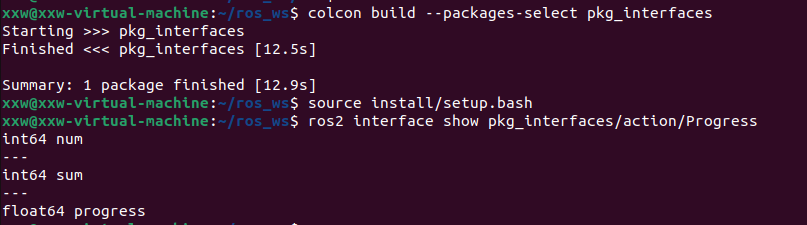
cd ~/ros_ws colcon build --packages-select pkg_interfaces
编译完成后在工作空间的install目录下将生成Progress.action文件对应的C++和Python文件,可以在终端进入工作空间,通过如下命令查看是否编译成功:
source install/setup.bash ros2 interface show pkg_interfaces/action/Progress
如果终端输出与Progress.action文件一致的内容则正常。
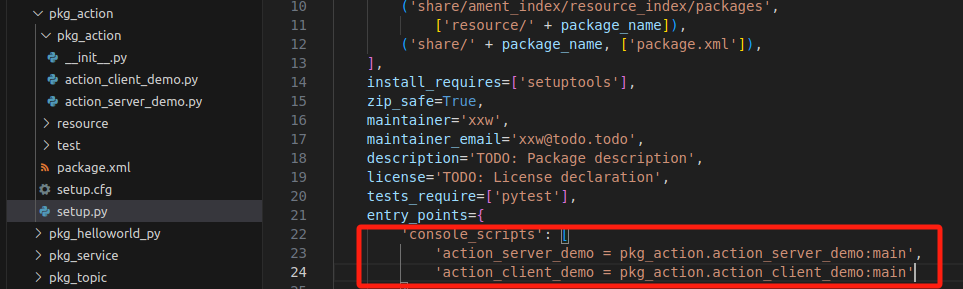
cd ~/ros_ws/src ros2 pkg create pkg_action --build_type ament_python --dependencies rclpy pkg_interfaces --node-name action_server_demo
import time
import rclpy
from rclpy.action import ActionServer
from rclpy.node import Node
from pkg_interfaces.action import Progress
class Action_Server(Node):
def __init__(self):
super().__init__('progress_action_server')
# 创建动作服务端
self._action_server = Action_Server(
self, Progress, 'get_sum', self.execute_callback
)
self.get_logger().info("action service starting!!!")
def execute_callback(self, goal_handle):
self.get_logger().info('start execute task...')
# 生成连续反馈
feedback_msg = Progress.Feedback()
sum = 0
for i in range(1, goal_handle.request.num + 1):
sum += i
feedback_msg.progress = i / goal_handle.request.num
self.get_logger().info('callback: %.2f' % feedback_msg.progress)
goal_handle.publish_feedback(feedback_msg)
time.sleep(1)
# 生成最终响应
goal_handle.succeed()
result = Progress.Result()
result.sum = sum
self.get_logger().info("task done!!!")
return result
def main(args=None):
rclpy.init(args=args)
Progress_action_server = Action_Server()
rclpy.spin(Progress_action_server)
Progress_action_server.destroy_node()
rclpy.shutdown()
import rclpy
from rclpy.action import ActionClient
from rclpy.node import Node
from pkg_interfaces.action import Progress
class Action_Client(Node):
def __init__(self):
super().__init__('progress_action_client')
# 创建动作客户端
self._action_client = Action_Client(self, Progress, 'get_sum')
def send_goal(self, num):
# 发送请求
goal_msg = Progress.Goal()
goal_msg.num = num
self._action_client.wait_for_server()
self._send_goal_future = self._action_client.send_goal_async(goal_msg, feedback_callback=self.feedback_callback)
self._send_goal_future.add_done_callback(self.goal_response_callback)
def goal_response_callback(self, future):
# 处理目标发送后的反馈
goal_handle = future.result()
if not goal_handle.accepted:
self.get_logger().info('request refuesd')
return
self.get_logger().info('request received, start execute task')
self._get_result_future = goal_handle.get_result_async()
self._get_result_future.add_done_callback(self._get_result_callback)
# 处理最终响应
def get_result_callback(self, future):
result = future.result().result
self.get_logger.info('final result sum = %d' % result.sum)
rclpy.shutdown
# 处理连续返回
def feedback_callback(self, feedback_msg):
feedback = (int)(feedback_msg.feedback.progress * 100)
self.get_logger().info('now progress: %d%%' % feedback)
def main(args=None):
rclpy.init(args=args)
action_client = Action_Client()
action_client.send_goal(10)
rclpy.spin(action_client)
cd ~/ros_ws colcon build --packages-select pkg_action source install/setup.bash
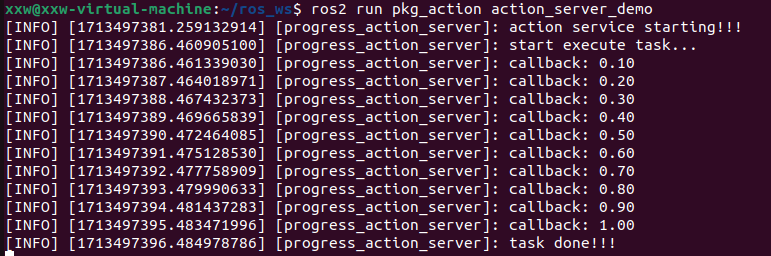
分终端分别启动服务端和客户端
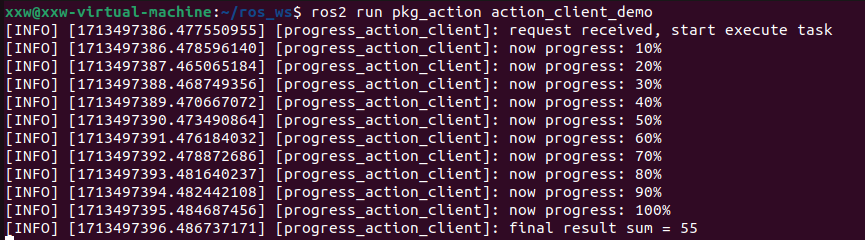
ros2 run pkg_action action_server_demo ros2 run pkg_action action_client_demo
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。