在计算机视觉、机器人导航、三维重建等应用中,相机标定是获取精确图像信息的关键第一步。通过标定,我们可以获得相机的内参矩阵(如焦距、主点坐标)和畸变系数(如径向畸变、切向畸变),从而对图像进行校正,并实现从像素坐标到真实世界坐标的准确映射。
本文将详细介绍如何使用 MATLAB 2025b 中自带的 Camera Calibrator App 对单目相机进行参数标定,涵盖从准备标定图像到导出标定结果的完整流程。
推荐使用标准的 棋盘格标定板(Checkerboard),因其角点特征清晰、易于自动检测。需提前测量并记录:
⚠️ 注意:格子数量指的是“内角点”数量,而非方格总数。例如,一个 10×7 的棋盘有 9×6 个内角点。
打开 MATLAB 2025b,依次点击顶部菜单栏:
App → Image Processing and Computer Vision → Camera Calibrator
即可进入相机标定界面。
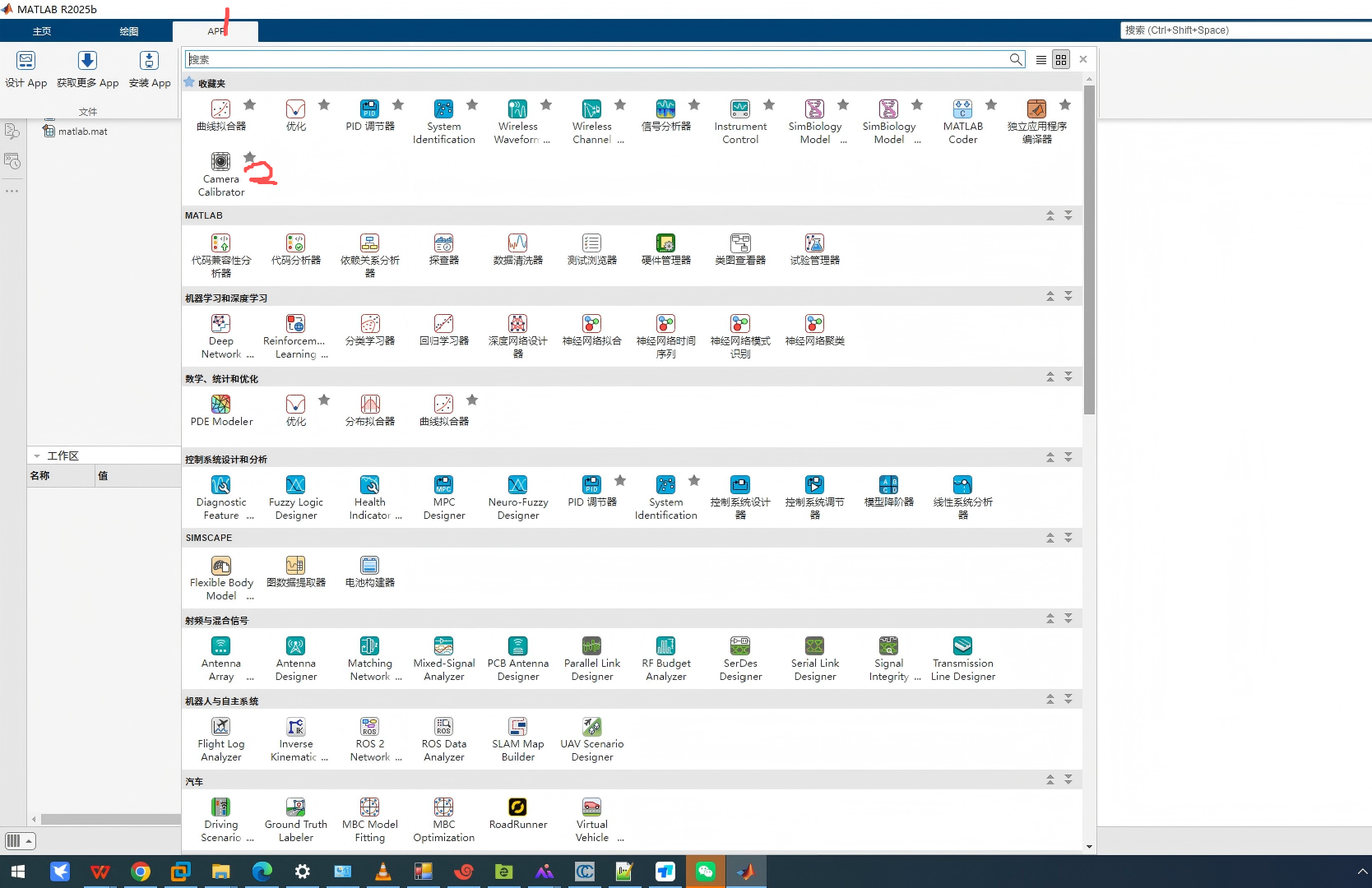
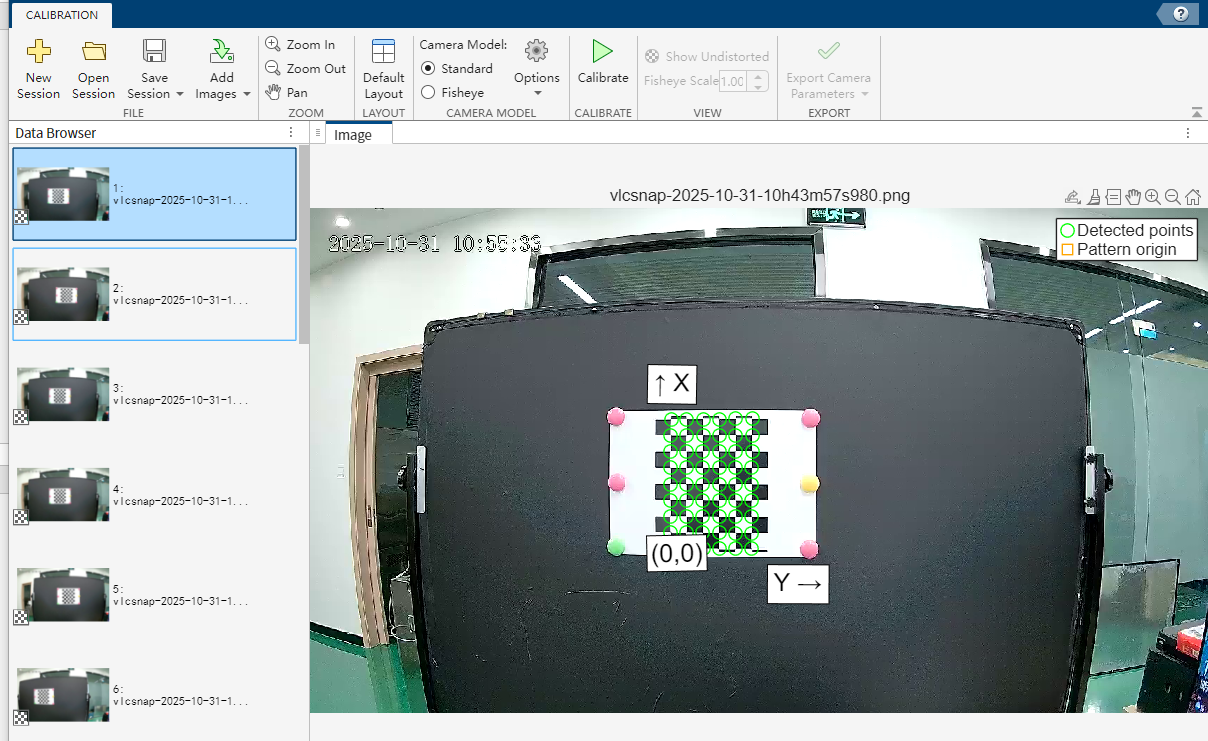
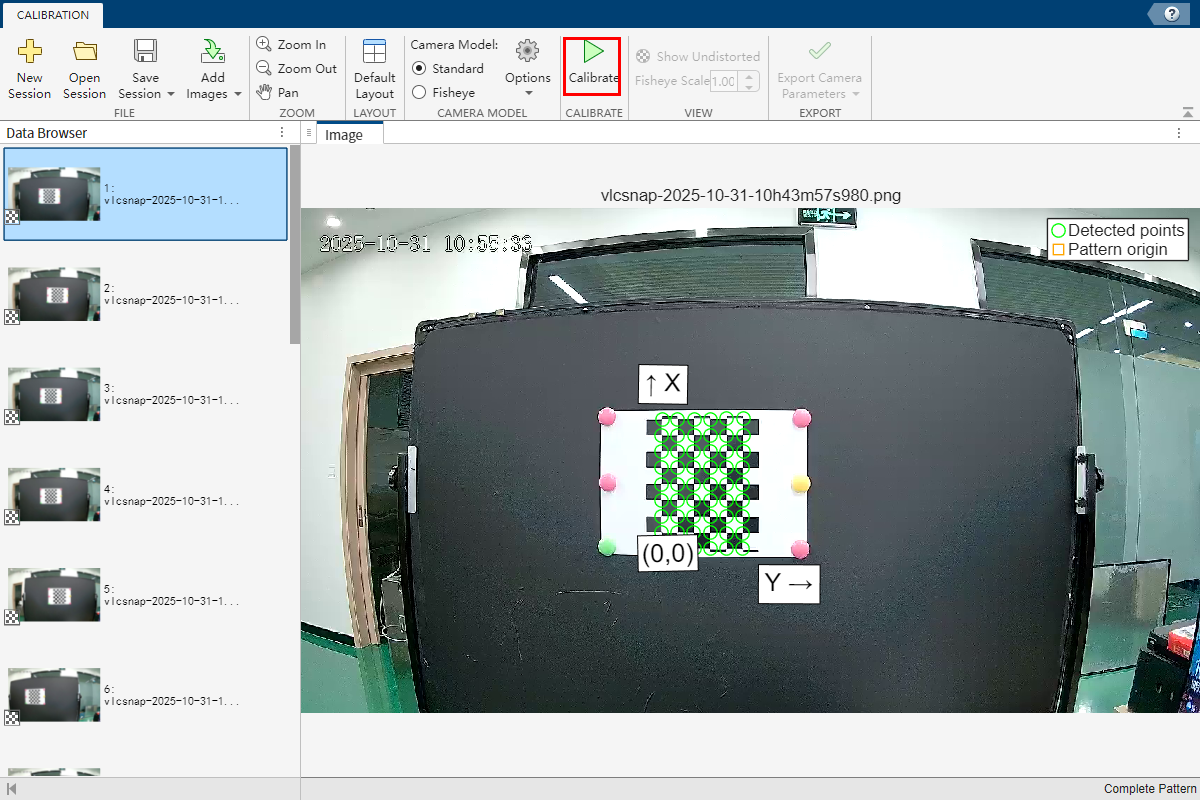
2. 进入 Camera Calibrator
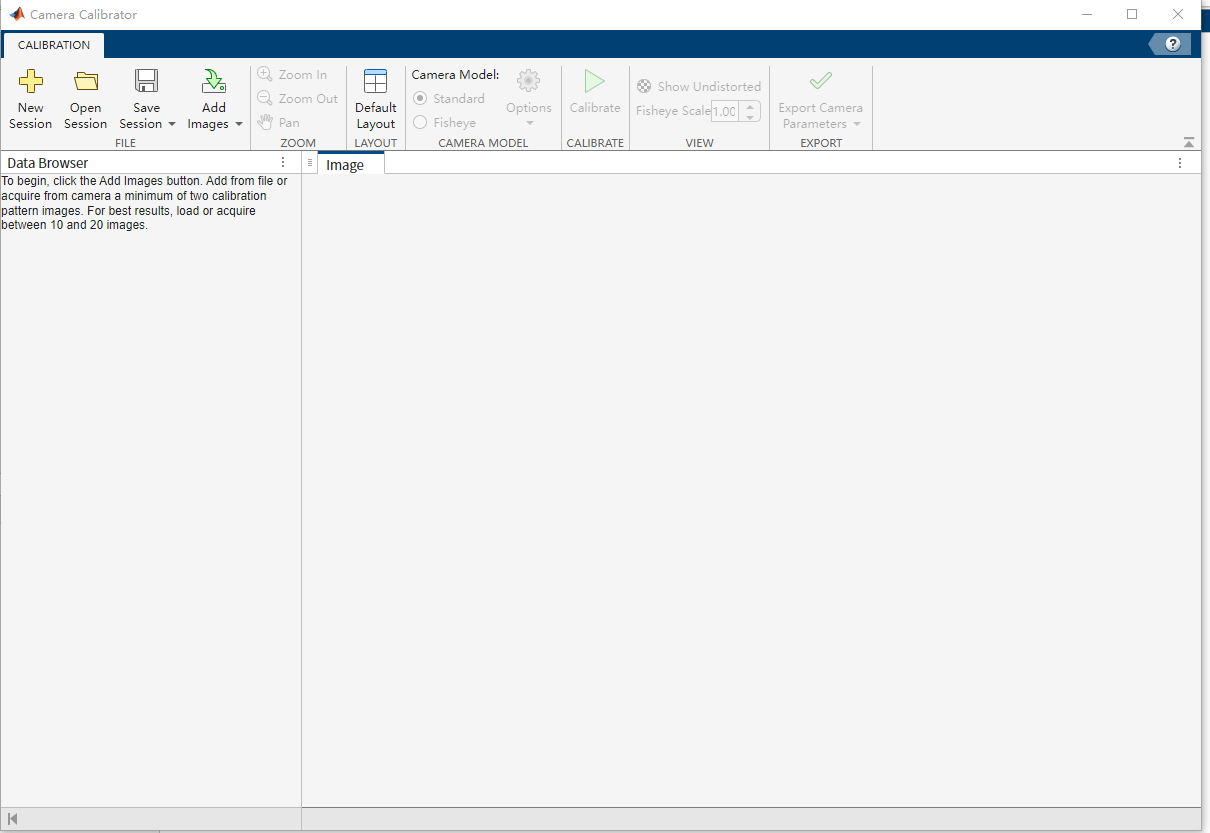
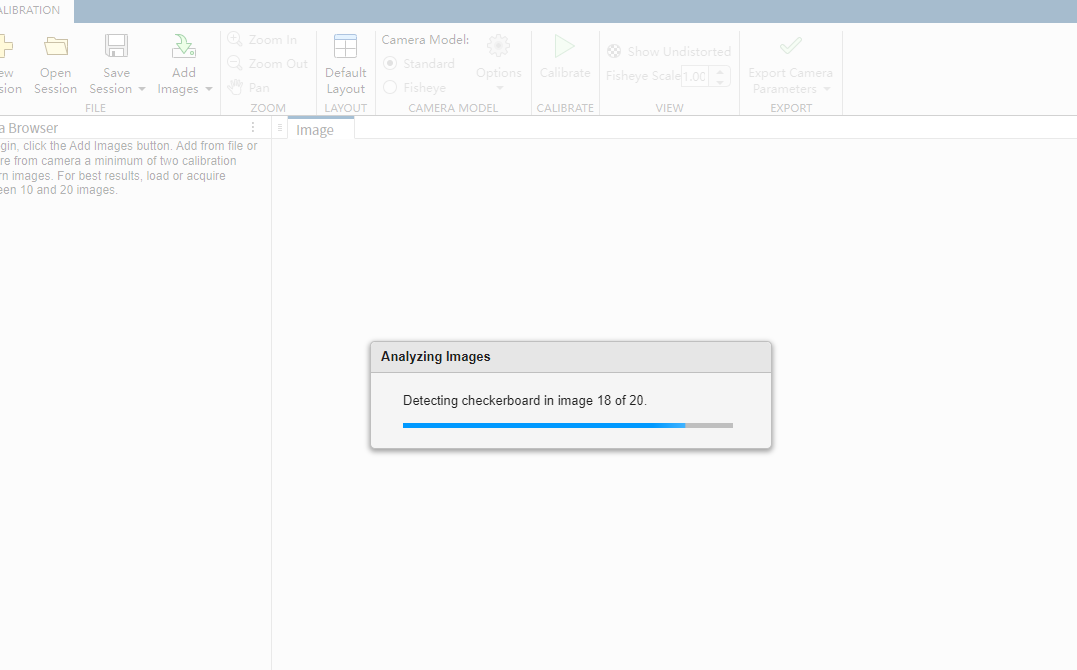
点击 “Add Images” 按钮,选择已准备好的标定图像文件夹。
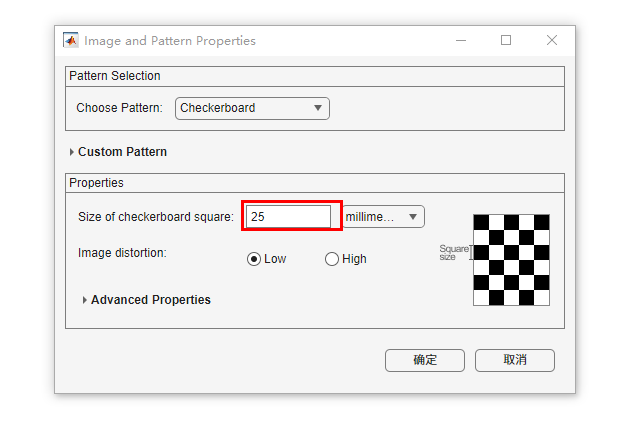
系统会弹出对话框,要求输入棋盘格参数:
✅ 建议单位使用 米(m),便于后续与雷达、IMU 等传感器单位对齐。
若部分图像无法检测到完整棋盘格,MATLAB 会自动跳过并提示,可手动剔除低质量图像。
参数根据你的真实的标定板修改为正确的参数
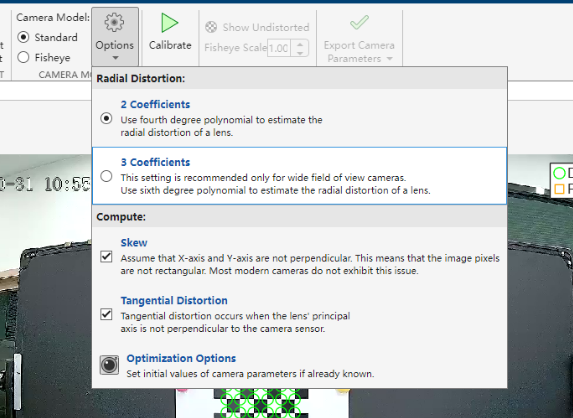
点击 “Calibration Options -> Radial Distortion(径向畸变)”,可调整以下参数:
这是镜头最常见的畸变类型,主要由透镜曲率引起,表现为图像中心与边缘之间的非线性拉伸或压缩。
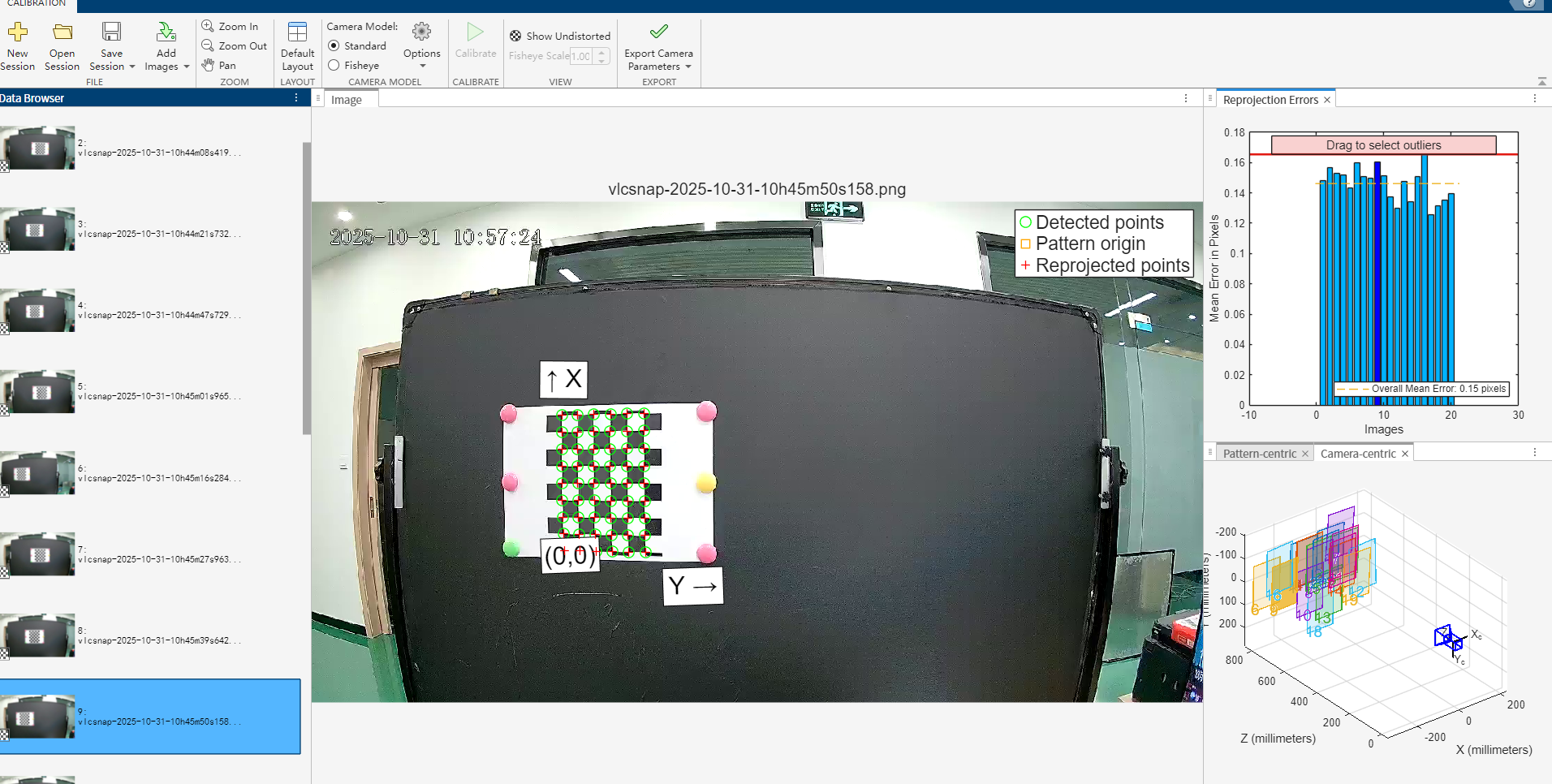
点击 “Calibrate” 按钮,MATLAB 将自动计算相机内参和畸变参数,并显示重投影误差(Reprojection Errors)。
理想情况下,平均误差应小于 0.5 像素。若误差过大,需检查图像质量或补充更多视角。
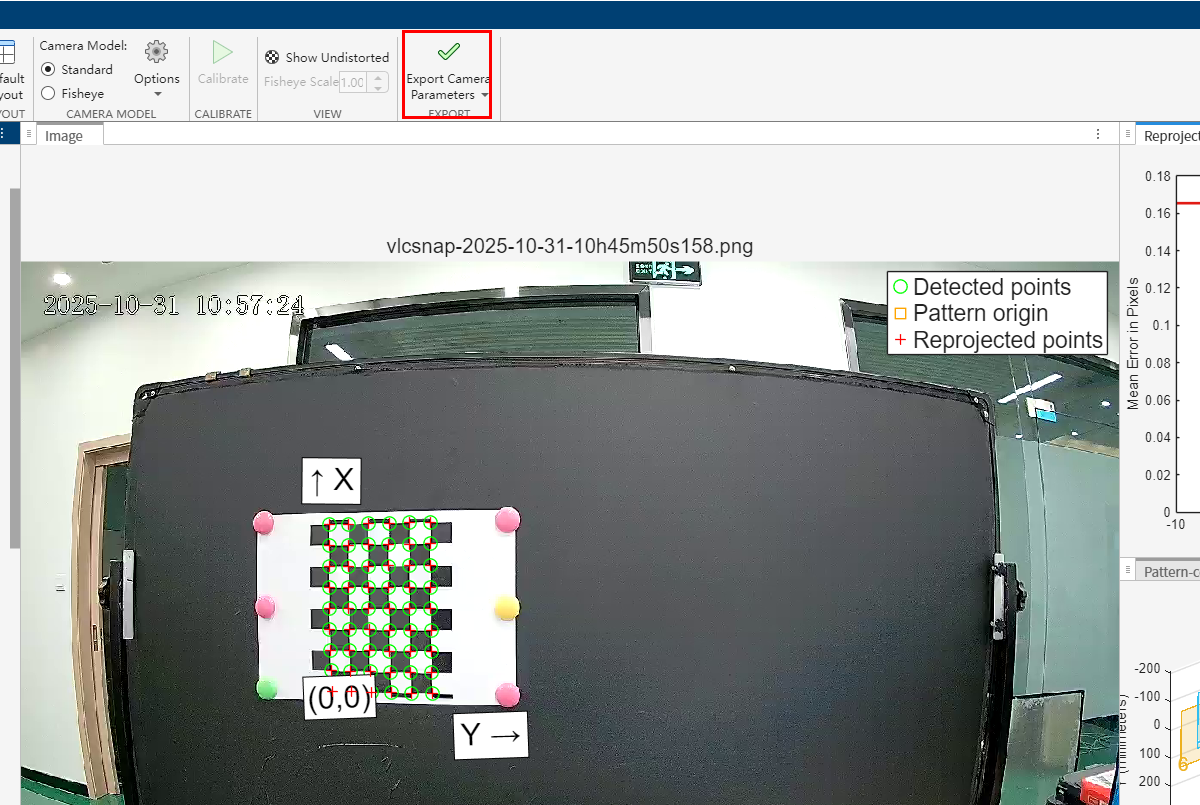
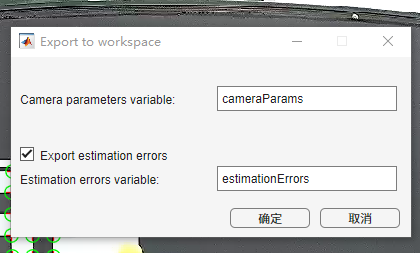
点击 “Export Camera Parameters”,将结果保存为 cameraParams 对象(cameraParameters 类型)。
该对象包含以下关键属性:
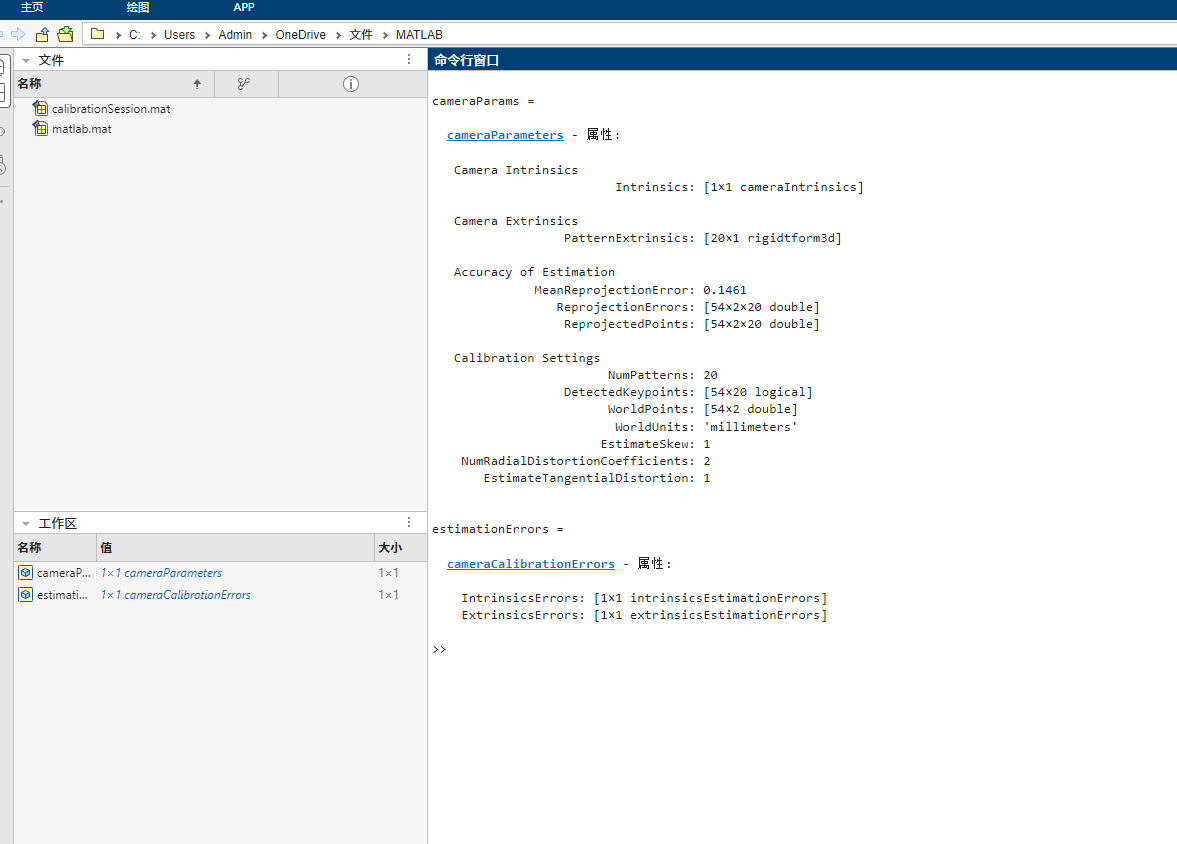
7.读取参数
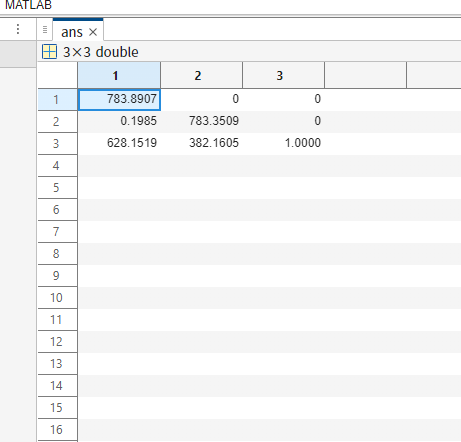
cameraParams.IntrinsicMatrix;
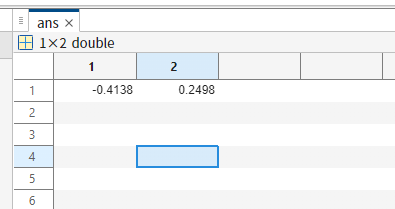
cameraParams.RadialDistortion;
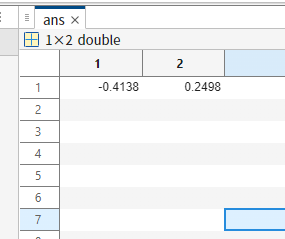
cameraParams.TangentialDistortion;
| 问题 | 原因 | 解决方案 |
|---|---|---|
| 无法检测棋盘格 | 光照不足、模糊、角度过大 | 重新拍摄,确保清晰且正面 |
| 重投影误差高 | 图像数量少、分布不均 | 增加多角度图像,覆盖图像四角 |
| 标定结果不稳定 | 标定板尺寸输入错误 | 仔细核对方格物理尺寸 |
| 去畸变后图像裁剪严重 | 畸变过大或视场角广 | 考虑使用鱼眼模型(需用 fisheyeCalibrator) |
相机标定虽为基础步骤,却是精度保障的基石。借助 MATLAB 强大的工具箱,我们能高效、可靠地完成这一过程。建议将标定参数妥善保存,并定期对同一相机重新标定(尤其在环境温度变化大或镜头被触碰后)。
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。