本文始发于:https://www.cnblogs.com/wildmelon/p/16159189.html
本文为常见的以图作为数据结构的寻路算法笔记,再次推荐该文章:
https://www.redblobgames.com/pathfinding/a-star/introduction.html
既有可交互的可视化界面,又有由浅到深的寻路算法讲解。
广度优先搜索的循环,是所有寻路算法(基于图节点)的关键。实际上会从起点开始,像在 Minecraft 游戏里倒一桶水般蔓延开来,遍历到图中的每个节点:
// 待搜索队列
Queue<TileNode> frontier = new Queue<TileNode>();
// 已搜索节点
HashSet<TileNode> reached = new HashSet<TileNode>();
// 从起点开始
TileNode start = TotalTileModels[character.cellPosition];
frontier.Enqueue(start);
reached.Add(start);
// 遍历搜索上下左右的邻节点
while (frontier.Count != 0)
{
TileNode current = frontier.Dequeue();
foreach (TileNode neighbor in current.neighbors)
{
if (!reached.Contains(neighbor))
{
frontier.Enqueue(neighbor);
reached.Add(neighbor);
}
}
}
如果需要找到路径,则用字典记录每个节点的“父节点”,找到目的地之后,从尾节点向上返回到起点:
private void BFS()
{
Queue<TileNode> frontier = new Queue<TileNode>();
// 若 cameFrom[B]=A,说明B的上一节点为A,B是在A的邻居中找到的
Dictionary<TileNode, TileNode> cameFrom = new Dictionary<TileNode, TileNode>();
TileNode start = TotalTileModels[character.cellPosition];
TileNode target = TotalTileModels[destination.cellPosition];
frontier.Enqueue(start);
cameFrom.Add(start, null);
while (frontier.Count != 0)
{
TileNode current = frontier.Dequeue();
foreach (TileNode neighbor in current.neighbors)
{
if (!cameFrom.ContainsKey(neighbor))
{
frontier.Enqueue(neighbor);
cameFrom.Add(neighbor, current);
// 找到目标,提前退出
if (neighbor == target) break;
}
}
}
TileNode link = target;
while (cameFrom[link] != null)
{
path.Add(link);
link = cameFrom[link];
}
path.reverse();
}
如果 path 为空,即字典 cameFrom 不存在 target。则说明没有从终点返回起点的路径。
广度优先搜索对于所有的节点采取一视同仁的态度,但许多游戏都存在地形的概念,如沙漠、森林等地点可能会消耗更多的步行时间。
此时我们引入成本记录跟踪,来得到 Dijkstra 算法,为了在待搜索节点中先计算当前成本最低的节点,需使用优先级队列:
private void Dijkstra()
{
// 优先级队列
PriorityQueue frontier = new PriorityQueue();
Dictionary<TileNode, TileNode> cameFrom = new Dictionary<TileNode, TileNode>();
// 当前节点已消耗的成本
Dictionary<TileNode, int> costSoFar = new Dictionary<TileNode, int>();
TileNode start = TotalTileModels[character.cellPosition];
TileNode target = TotalTileModels[destination.cellPosition];
// 从起点开始搜索
frontier.Push(start, 0);
costSoFar.Add(start, 0);
cameFrom.Add(start, null);
while (frontier.GetCount() != 0)
{
TileNode current = (TileNode)frontier.Out();
// 到达目标,提前退出
if (current == target) break;
foreach (TileNode neighbor in current.neighbors)
{
int newCost = costSoFar[current] + neighbor.cost;
// 未计算过该节点,或有新成本更低的路径时,才进行计算
if (!costSoFar.ContainsKey(neighbor) || newCost < costSoFar[neighbor])
{
frontier.Push(neighbor, newCost);
costSoFar[neighbor] = newCost;
cameFrom.Add(neighbor, current);
mClickableTilemap.mTilemap.SetColor(neighbor.position, Color.blue);
}
}
}
while (cameFrom[target] != null)
{
mClickableTilemap.mTilemap.SetColor(target.position, Color.red);
target = cameFrom[target];
}
}
Dijkstra 算法,会跳过中间消耗更高的水路:
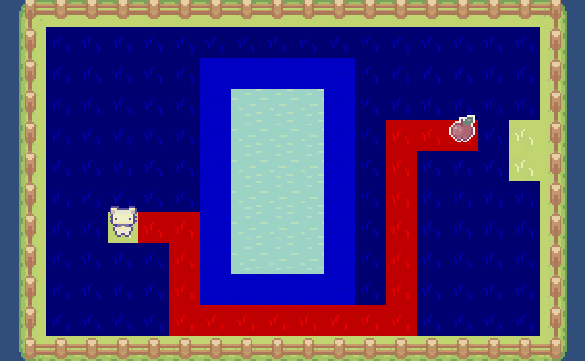
同时可以发现,如果每个地块的移动成本都是一致的(比如都是平原),那么 Dijkstra 算法和广度优先搜索其实是一样的。
无论是广度优先搜索还是 Dijkstra 算法,都是以一种往外辐射的方式进行扩散的。但路径寻找通常是有明确的方向性的(从起点指向终点方向),Dijkstra 算法会往相反的方向扩散,对性能造成较大影响。
Dijkstra 算法,只记录了从起点到当前点的已消耗成本。我们将定义一个启发式函数,对距离目标还有多远进行评估,来得到(预估成本)。
某个节点的总成本=已消耗成本+预估成本,在待搜索队列中,优先选取总成本最低的节点进行计算。
预估成本可以由距离、时间或者其他游戏特定因素来决定的。
以距离为例,常用的启发式函数有两种:
理想情况下,启发式结果与真实结果越相近越好,上面两个距离相关的启发式函数,在节点离终点越近时,预估成本都越小。
举例来说,同样是一片平原,已消耗成本为6时,有多种方案可选,既可以往终点走6步,也可以远离终点。而在加入了启发式函数进行预估成本评估后,显然离终点更近的节点的预估成本和总成本会更低,并优先选取计算。
“曼哈顿距离”的预估成本通常会高于真实开销,因为可能存在对角线斜走的可能,有一定概率无法发现最佳路径。
“欧几里得距离(两点之间的直线距离)”的预估成本通常低于真实开销,则可能会遍历更多的节点影响性能。
在贪婪最佳优先算法中,会忽略已消耗成本,只考虑启发函数计算的预估成本。
即:某个节点的总成本=预估成本。
以“曼哈顿距离”为启发式函数为例,贪婪最佳优先算法会优先考虑离目标更近的点:
private void Greedy()
{
PriorityQueue frontier = new PriorityQueue();
Dictionary<TileNode, TileNode> cameFrom = new Dictionary<TileNode, TileNode>();
TileNode start = TotalTileModels[character.cellPosition];
TileNode target = TotalTileModels[destination.cellPosition];
frontier.Push(start, 0);
cameFrom.Add(start, null);
while (frontier.GetCount() != 0)
{
TileNode current = (TileNode)frontier.Out();
// 到达目标,提前退出
if (current == target) break;
foreach (TileNode neighbor in current.neighbors)
{
if (neighbor.nodeType == NodeType.Road && !cameFrom.ContainsKey(neighbor))
{
int cost = heuristic(neighbor, target);
frontier.Push(neighbor, cost);
cameFrom.Add(neighbor, current);
mClickableTilemap.mTilemap.SetColor(neighbor.position, Color.blue);
}
}
}
while (cameFrom[target] != null)
{
mClickableTilemap.mTilemap.SetColor(target.position, Color.red);
target = cameFrom[target];
}
}
在平坦地形上,贪婪算法效率是很高的,因为他会直奔目标而去(优先考虑预估距离更近的点)。但当存在障碍物时,路径质量可能不太理想,因为会一直先取更近的点,所以可能会得到不太准确的路径:
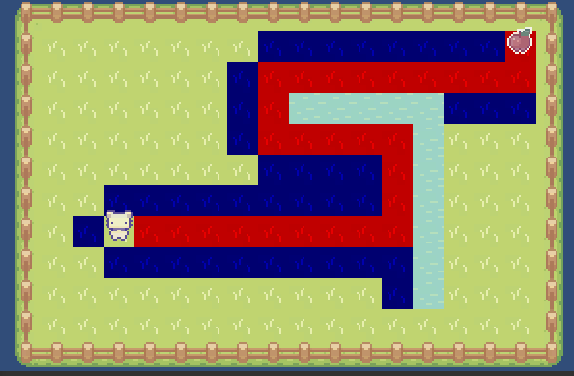
如图,起点左边、上边、下方的方块由于距离更远的原因,会排在优先级队列的尾部,起点右上方的方块会优先计算并组成路径。
上文可知:
对于 Dijkstra 算法,总成本=已消耗成本,可以很好地找到最短路径,但在方向不确定的情况下会消耗更多的性能。
对于贪婪最佳优先算法,总成本=预估成本,效率更高,但可能找不到最短路径。
而 A* 算法,综合了考虑当下和未来(由启发式函数决定):总成本=已消耗成本+预估成本。
// 微调 Dijkstra 函数即可
...
int priority = newCost + heuristic(neighbor, target);
frontier.Push(neighbor, priority);
...
由上代码可知,Dijkstra 算法可当作 heuristic 函数返回 0 的A*算法。
三种算法是在“已消耗成本”与“预估成本”之间进行评估,以在效率和路径质量之间做取舍。
本质上仍旧是开头的“广度优先搜索”循环的一种优化。
可视化对比三种算法的不同,可参考 redblobgames 的这篇文章末尾:https://www.redblobgames.com/pathfinding/a-star/introduction.html
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。