获得矢量图可以用jupyter导出为markdown格式然后下载导出的压缩包,里面的svg格式文件就是矢量图,可以直接拖进Word。
import numpy as np
from scipy import stats
import matplotlib.pyplot as plt
cos2s = '0*0.03*0.12*0.25*0.41*0.59*0.75*0.88*0.97*1'
cos2 = np.array(list(map(float, cos2s.split('*'))))
lefts = '5.2*9.1*20.5*38.8*61.5*86.4*110.1*128.9*142.3*147.1'
left = np.array(list(map(float, lefts.split('*'))))
rights = '5.2*9.7*22.5*41.3*64.2*87.9*111.8*131.2*143.3*147.8'
right = np.array(list(map(float, rights.split('*'))))
# 打开网页内绘图并调成矢量绘图模式
%matplotlib inline
%config InlineBackend.figure_format = 'svg'
plt.rcParams['font.sans-serif'] = ['SimHei'] # 字体
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams['font.size'] = 10 # 字体大小plt.figure(figsize=(8, 4)) # 图片大小
plt.grid(True) # 显示网格
kl, bl, *_ = stats.linregress(cos2, left) # 线性回归方程
plt.scatter(cos2, left, c='k', marker='o') # 画点
plt.plot(cos2, kl * cos2 + bl, 'k-', label='Ⅱ左旋') # 划线
kr, br, *_ = stats.linregress(cos2, right)
plt.scatter(cos2, right, c='k', marker='D')
plt.plot(cos2, kr * cos2 + br, 'k--', label='Ⅰ右旋')
plt.title('通过两偏振器的光强I与两透光轴间夹角$\\theta$的关系测量数据')
plt.xlabel('$cos^2 \\theta $')
plt.ylabel(u'光强/$10^{-7}A$')
plt.legend() # 显示图例
plt.show()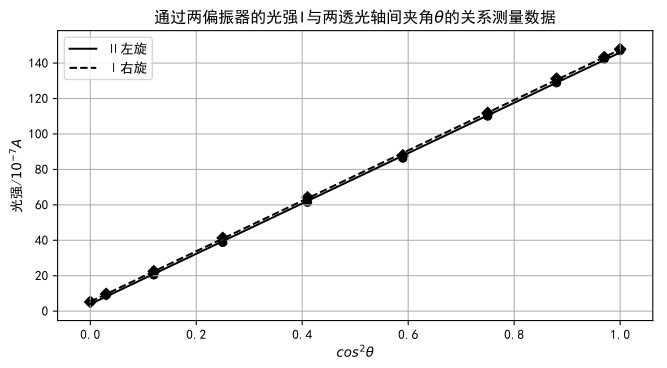
p2 = np.arange(0, 360, 10) / 180 * np.pi
sens = '40.8*34.6*29.9*28*28.4*31.3*36.3*42.7*49.9*56.9*62.9*'
sens += '67.2*69.2*68.5*65.6*60.3*53.6*45.9*39.1*33.2*29.1*27.3*'
sens += '28*31.4*36.9*44*51.8*59.3*65.7*70.2*72.7*72.1*69*'
sens += '63.4*56.3*48.7'
sen = np.array(list(map(float, sens.split('*'))))
a2 = np.max(sen) / 0.75
print(np.max(sen))
sent = a2 * (0.75 * np.cos(p2 + np.pi / 3) ** 2 + 0.25 * np.sin(p2 + np.pi / 3) ** 2)
print(np.max(sen) / np.min(sen), np.max(sent) / np.min(sent))
plt.figure(figsize=(5, 5))
plt.subplot(111, projection="polar") # 设置画图方式为极坐标
plt.grid(True)
plt.plot(np.append(p2, p2[0]), np.append(sen, sen[0]), 'k-o', label='测量值')
plt.plot(np.append(p2, p2[0]), np.append(sent, sent[0]), 'k-D', label='理论值')
plt.title('椭圆偏振光光强测量数据')
plt.xticks(p2) # X坐标对应极坐标图的角坐标
plt.legend()
plt.show()72.7
2.663003663003663 3.0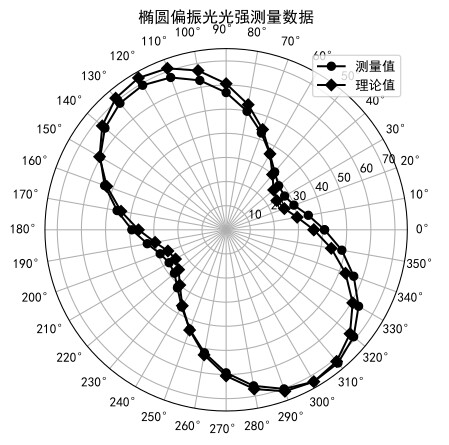
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。