全球定位系统(GPS)是“授时、测距导航系统/全球定位系统(Navigation systerm Timing and Ranging/Global Positioning System)的简称,可以为地球上任意位置提供定位服务。本文介绍其工作原理。
全球定位系统(GPS, Global Positioning System)是“授时、测距导航系统/全球定位系统(Navigation systerm Timing and Ranging/Global Positioning System)的简称。该系统是由美国国防部于1973年组织研制,主要为军事导航与定位服务的系统。历经20年,耗资300亿美元,于1993年建设成功。GPS是利用卫星发射的无线电信号进行导航定位,具有全球性、全天候、高精度、快速实时三维导航、定位、测速和授时功能,以及良好的保密性和抗干扰性。它已成为美国导航技术现代化的重要标志,被称为本世纪继阿波罗登月、航天飞机之后又一重大航天技术。
全球有四大卫星定位系统分别是:中国北斗卫星导航系统(BDS)、美国全球定位系统(GPS)、俄罗斯格洛纳斯卫星导航系统(GNSS)和欧盟研制伽利略卫星导航系统(GSNS)。
| BDS(北斗) | GPS | GLONASS(格洛纳斯) | GALILEO(伽利略) | |
|---|---|---|---|---|
| 所属国家 | 中国 | 美国 | 俄罗斯 | 欧盟 |
| 卫星数量 | 55 | 33 | 28 | 26 |
| 首次发射年份 | 2000年 | 1978年 | 1982年 | 2005年 |
| 轨道类别 | MEO(47)+GET(5)+IGEO(3) | MEO | MEO | MEO(24)+Elliptical(2) |
| 主要功能 | 定时、导航、授时、短报文通信、国际搜救 | 定时、导航、授时 | 定时、导航、测量、授时 | 定时、导航、搜救、授时 |
| 抗干扰能力 | 强 | 弱 | 强 | 强 |
| 优势 | 安全性高,短报文通信 | 发展成熟,民用市场占有率高 | 北极附近定位性能强 | 非军方控制、实时高精度定位 |
| 定位精度 | 10米(三代可达 2.5-5米) | 10米(非民用可达厘米和毫米级) | 3-10米 | 1米 |
| 平均寿命 | 5-8年 | 10-15年 | 7-10年 | 12年 |
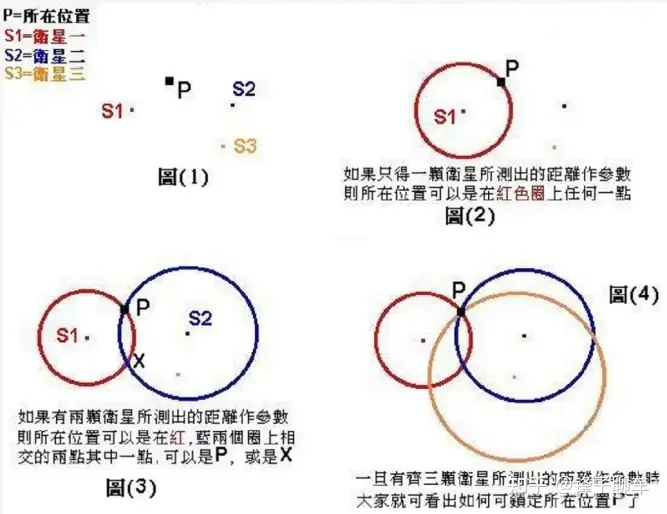
GPS定位中用到的原理是三角定位法。简单来说,就是通过在不同的位置测量卫星和接收器之间的距离,从而确定接收器的位置。
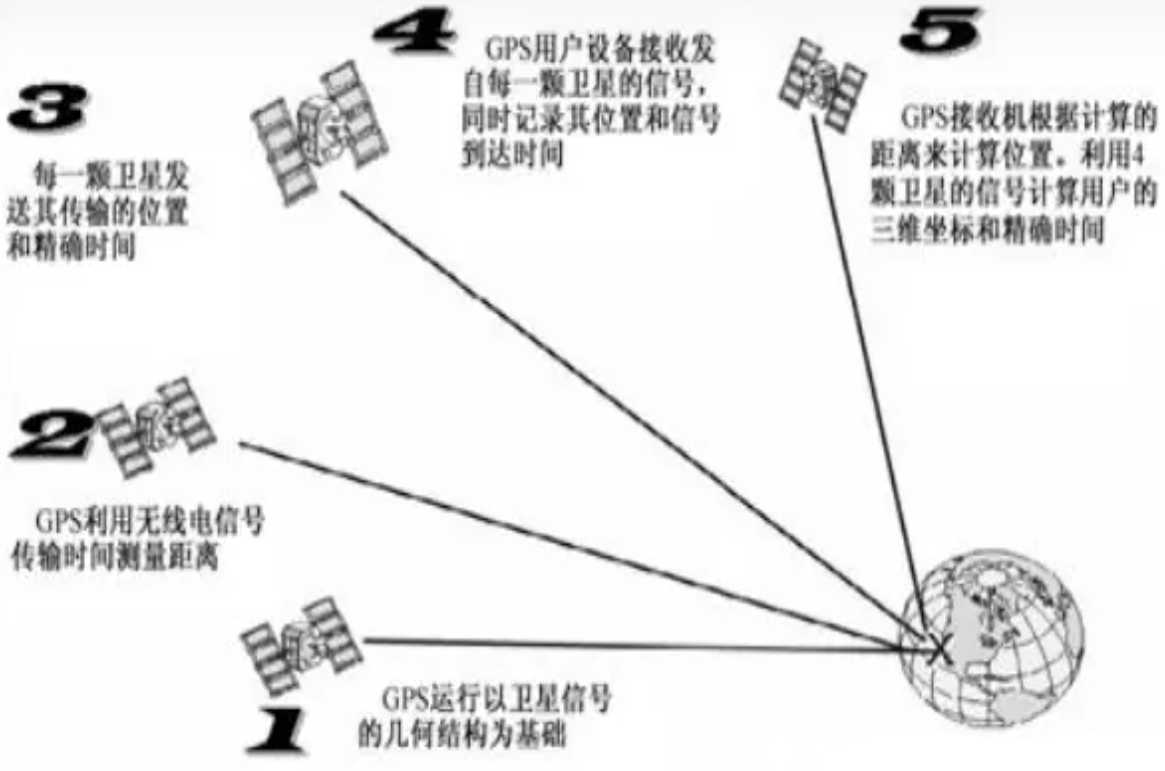
GPS系统由一组在地球轨道上均匀分布的卫星组成。这些卫星不断地向地面发射包含自身精确位置(星历)、时间和校正数据的无线电信号。通常,一个完整的GPS星座由至少24颗卫星构成,确保全球范围内任何地点的用户都可以同时接收到至少4颗卫星的信号。
a、如果只有一颗卫星测出来的距离做参考,则所在位置可以是红圈内的任意一点;
b、如果有两颗卫星所测出的距离做参数,则在所在位置可以是红、蓝两个圈上的相交的两点其中一点,可以是P,或是X;
c、一旦有齐三颗卫星所测出来的距离做参数时,大家就可看出如何可锁定所在位置P了
卫星测距实施的是“到达时间差”(时延)的概念:利用每一颗GPS卫星的精确位置和连续发送的星上原子钟生成的导航信息获得从卫星至接收机的到达时间差。
**GPS卫星在空中连续发送带有时间和位置信息的无线电信号,供GPS接收机接收。**由于传输的距离因素,接收机接收到信号的时刻要比卫星发送信号的时刻延迟,通常称之为时延,因此,也可以通过时延来确定距离。卫星和接收机同时产生同样的伪随机码,一旦两个码实现时间同步,接收机便能测定时延;将时延乘上光速(也就是d=c(Tx-T),其中c表示为光速),便能得到距离。图中显示了GPS系统的时延原理。
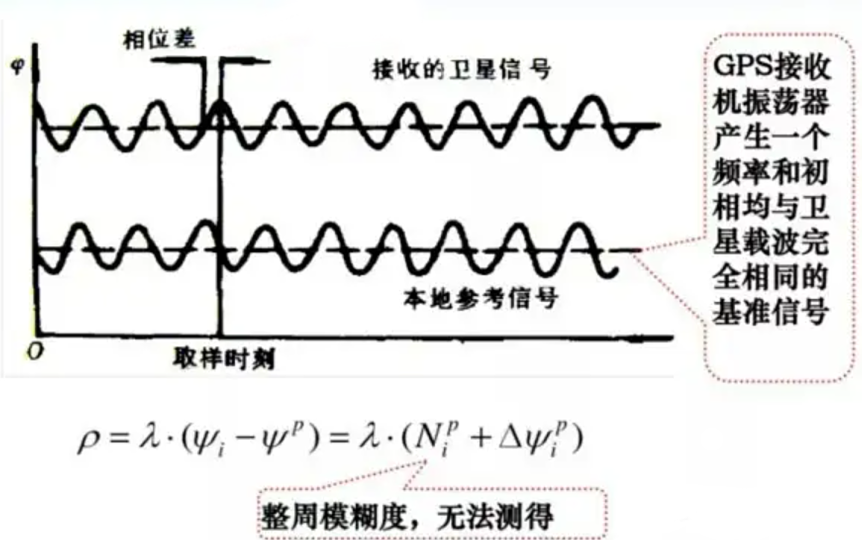
通过测量从GPS卫星发射的原始载波相位到待测设备接收的载波相位之差,得到载波传输距离。和测试伪距原理一样计算待测点和卫星之间的距离,利用多个方程式计算待测点XYZ坐标。
测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。
我们还是从坐标系的位置说起,正常情况下需要知道笛卡尔坐标系下的 (x,y,z) 三个坐标分量,同时还有一个时间 $t_0$ 的分量,那么这样算起来就有四个未知数,至少需要4个方程才能解出来,那么就至少需要4颗卫星才能组成4个方程。
注:已知位置的卫星,三维空间中,每一颗卫星对应一个三维坐标(X,Y,Z),而各个卫星的xyz坐标为已知数
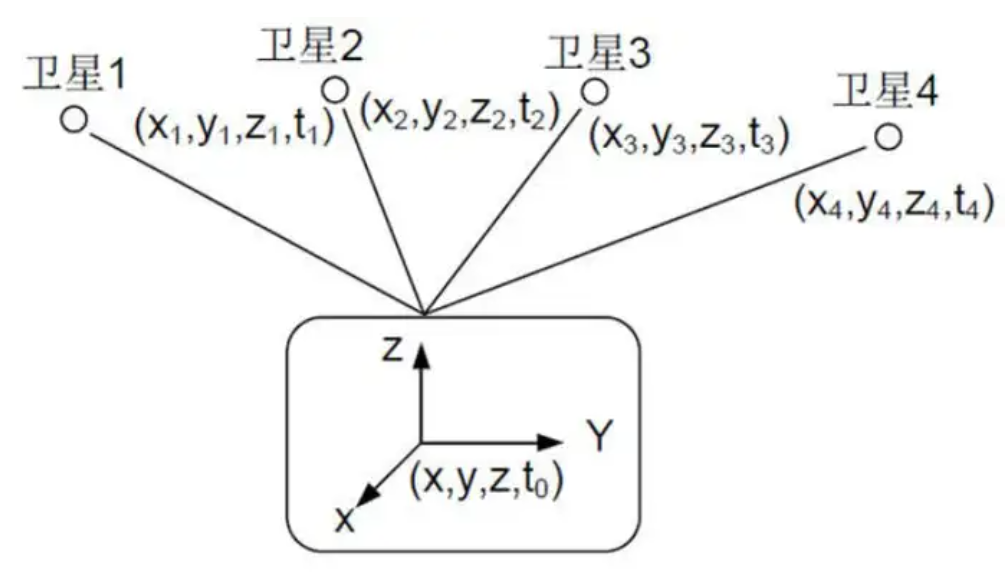
$$ \begin{array}{c} [(\mathrm{x}_{1}-\mathrm{x})^{2}+(\mathrm{y}_{1}-\mathrm{y})^{2}+(\mathrm{z}_{1}-\mathrm{z})^{2}]^{1/2}=\mathrm{c}(\mathrm{t}_{1}-\mathrm{t}_{0})\\ [(\mathrm{x}_{2}-\mathrm{x})^{2}+(\mathrm{y}_{2}-\mathrm{y})^{2}+(\mathrm{z}_{2}-\mathrm{z})^{2}]^{1/2}=\mathrm{c}(\mathrm{t}_{2}-\mathrm{t}_{0})\\ [(\mathrm{x}_{3}-\mathrm{x})^{2}+(\mathrm{y}_{3}-\mathrm{y})^{2}+(\mathrm{z}_{3}-\mathrm{z})^{2}]^{1/2}=\mathrm{c}(\mathrm{t}_{3}-\mathrm{t}_{0})\\ [(\mathrm{x}_{4}-\mathrm{x})^{2}+(\mathrm{y}_{4}-\mathrm{y})^{2}+(\mathrm{z}_{4}-\mathrm{z})^{2}]^{1/2}=\mathrm{c}(\mathrm{t}_{4}-\mathrm{t}_{0}) \end{array} $$
下面是接收机在搜到不同卫星数量的时候可以做的工作,在搜到1颗卫星的时候就可以更新时和日期了,但是要实现经纬度和高度的定位至少也是需要4颗卫星以上才能有海拔信息的输出。
| 使用卫星数量 | 定位 | 备注 |
|---|---|---|
| 0 | 无法定位 | |
| 1 | 无法定位 | 可以更新 UTC 时间和日期 |
| 2 | 无法定位 | |
| 3 | 可以实现 2D Fix,输出经纬度 | 不可输出海拔信息 |
| 4 | 可以实现 3D Fix | 可输出正确海拔信息 |
| > 4 | 可以实现 3D Fix | 可输出伪距 |
卫星定位最不好解决的问题就是误差,因为信号在传输的时候,因为大气等因素的影响,速度哪怕慢一丁点,影响都比较大,因为光速特别快,所以GPS的误差一般是在几米到几十米,想要减少误差,我们就要用差分GPS这项技术,它可以大大提高GPS的定位精度。
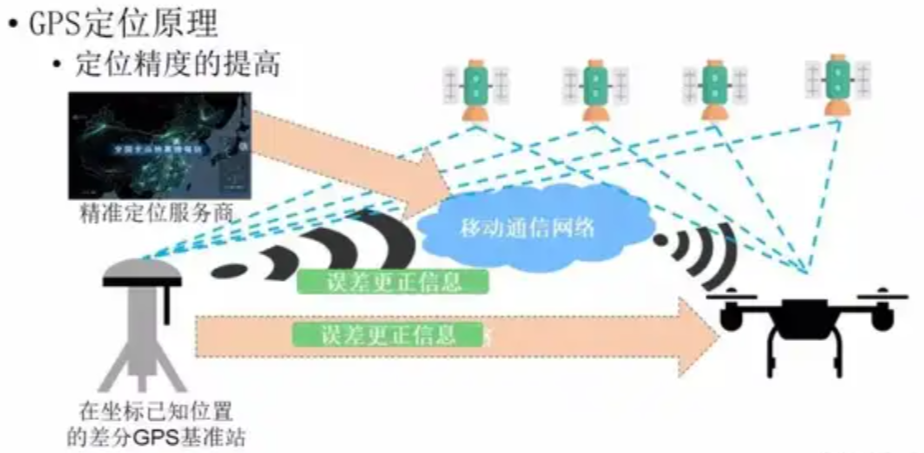
它是在无人机相对较近的已知坐标点上布放一个GPS基准站,它也可以接收到为无人机提供位置信息的4颗卫星的信号,根据这些信号算出坐标值,然后与已知的坐标比较,得出坐标的偏差量,然后将偏差量或者实时测得的载波相位,通过数传链路或移动通信网络发送给无人机,无人机根据接收到的信息进行修正。还可以为无人机在专业的精准定位服务商购买定位服务,通过移动通信网络接收误差更正信息来更修正位置。
差分 GPS 中有一个很重要的元素,就是基准站,基准站的坐标精度直接决定了差分定位的精度。
基准站获取高精度经纬度坐标通常涉及以下几个步骤:
基准站获取的高精度经纬度坐标对于地理信息系统(GIS)、土地测绘、地震监测、农业等领域具有重要意义。通过提供高精度的位置信息,基准站支持着各种位置相关的科学研究和实践活动。
文章链接:
https://www.zywvvd.com/notes/devices/gps/how-gps-works/how-gps-works/
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。