灰度共生矩阵(GLCM, Gray-level co-occurrence matrix) 是一种灰度图像纹理特征提取的方法, 是目前最常见、应用最广泛、效果最好的一种纹理统计分析方法之一, Haralick 据此定义了14种纹理特征 ,本文记录相关内容。
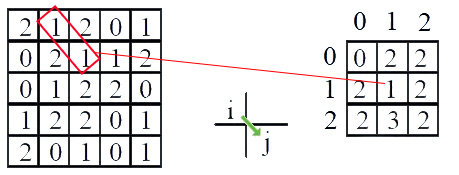
左边是一幅 $5 \times 5$ 的图像,其中灰阶为 ${0,1,2}$,三阶灰度,因此共生矩阵维度为 $3 \times 3$,在定义好向量方向后,统计图像中按照向量方向产生的数据对,将数据对的总数量填入共生矩阵的对应位置。
$$ \mathbf{G}=\left[\begin{array}{cccc}p(1,1) & p(1,2) & \cdots & p\left(1, N_{g}\right) \\ p(2,1) & p(2,2) & \cdots & p\left(2, N_{g}\right) \\ \vdots & \vdots & \ddots & \vdots \\ p\left(N_{g}, 1\right) & p\left(N_{g}, 2\right) & \cdots & p\left(N_{g}, N_{g}\right)\end{array}\right] $$
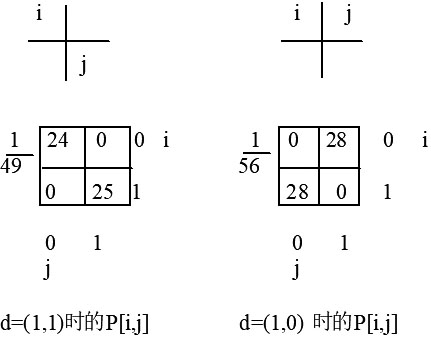
$p(i,j)$ 是通过计算一个值为 $i$ 的像素与值为 $j$ 的像素相邻的次数,然后将整个矩阵除以所进行比较的总次数而产生的。
共生矩阵的大小
在不对原图像灰度级别进行压缩的情况下,共生矩阵的大小为原图像灰度的级数的平方;
在实际应用中,从纹理特征的计算效率以及共生矩阵的存储方面考虑,通常先把原始图像的灰度等级进行压缩比如从灰度级别为 0-255 的 8bit 图像压缩为灰度级别为 0-31的 5bit 图像,相应的共生矩阵的维数从 $256\times256$ 降低到 $32 \times32 $
基准窗口
当前像素为中心的某一个窗口,尺寸通常为奇数方阵,大小可设为$3 \times3$,$5 \times5 $,$7 \times7 $等
移动窗口
以基准窗口为参考窗口,通过设定的移动方向和步长进行移动的窗口。尺寸大小与基准窗口的一样,位置由移动方向与步长决定
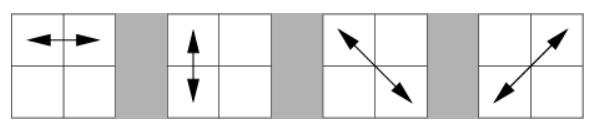
移动方向
基准窗口与移动窗口的相对方向。移动方向可以任意设定,通常为0°,45°,90°,135°
移动步长
基准窗口中心像元和移动窗口中心像元的距离 (用像素表示)

$$
Mean =\sum_{i} \sum_{j} p(i, j)· i
$$
方差、标准差反映像元值与均值偏差的度量,当图像中灰度变化较大时,方差、标准差值较大。
公式
$$
Variance =\sum_{i} \sum_{j} p(i, j)· (i-Mean)^2
$$
$$
Std = \sqrt{Variance}
$$
$$
Homogeneity=\sum_{i} \sum_{j} \frac{1}{1+(i-j)^{2}} p(i, j)
$$
$$
Contrast=\sum_{i=1}^{N_{s}} \sum_{j=1}^{N_{s}} p(i, j) (i-j)^2
$$
度量与对比度相类似,但是是线性增加。如果局部的对比度越高,则非相似度也越高。
公式:
$$
Dissmilarity =\sum_{i} \sum_{j} p(i, j){·}|i-j|
$$
$$
Entropy =-\sum_{i} \sum_{j} p(i, j){·} \ln p(i, j)
$$
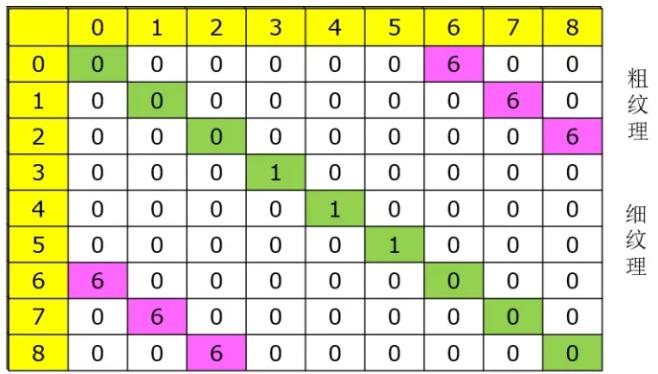
也叫能量,是图像灰度分布均匀性的度量。当GLCM中元素分布较集中于主对角线附近时,说明局部区域内图像灰度分布较均匀,ASM取值相应较大;相反,如果共生矩阵的所有值均相等,则ASM值较小。
公式:
$$
ASM = \sum_{i} \sum_{j} p(i, j)^{2}
$$
$$ Correlation =\sum_{i} \sum_{j} \frac{(i-\text { Mean }) (j-\text { Mean }) p(i, j)^{2}}{\text { Variance }} $$
文章链接:
https://www.zywvvd.com/notes/study/image-processing/feature-extraction/image-glcm/image-glcm/
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。