工作中遇到需要用到 GIS 基础知识,本文记录地理坐标和投影坐标系的概念。
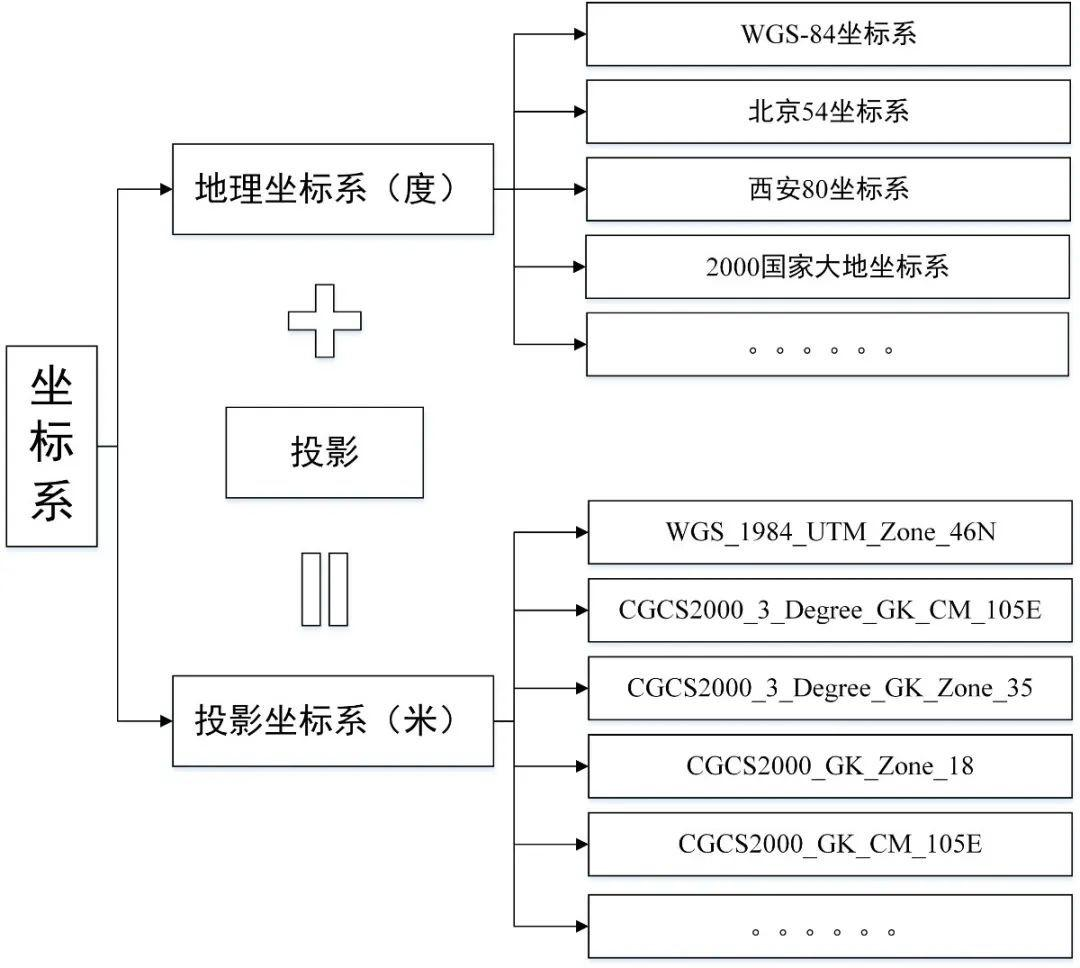
“地理坐标系统”(Geographic Coordinate System,GCS)和"投影坐标系统"(Projected Coordinate System,PCS)是地理信息系统(GIS)中用于描述和定位地球表面上位置的两种不同的坐标系统。
ArcGis 提供了一个可伸缩的、全面的 GIS 平台,具有强大的地图制作、空间数据管理、空间分析、空间信息整合、发布与共享的能力。可以辅助 GIS 学习、开发过程。
| 地理坐标系统 (GCS) | 投影坐标系统 (PCS) | |
|---|---|---|
| 坐标系 | 球面坐标系 | 平面坐标系 |
| 参考面 | 椭球面 | 水平面 |
| 坐标单位 | 经纬度 | 米 |
| 描述方式 | 地理坐标系统使用经度和纬度来描述地球表面上的位置。经度表示东西方向上的位置,纬度表示南北方向上的位置。 | 投影坐标系统使用平面坐标来描述地球表面上的位置,通过将地球表面投影到一个平面上来实现。投影是一种将三维地球表面映射到二维平面上的数学转换。 |
| 表达方式 | 坐标以度、分、秒(DMS)或者十进制度(DD)的形式表示。例如,纽约市的地理坐标可能是经度 -74.0059°,纬度 40.7128°。 | 坐标通常以米或者英尺为单位表示,可以是直角坐标系(x,y)的形式。例如,通用横轴墨卡托投影(Universal Transverse Mercator,UTM)使用了直角坐标系。 |
| 应用范围 | 主要用于全球性的地理表示,适用于较大范围的地图或空间分析。 | 主要用于局部地图,适用于小到中等范围的地理表示和测量。 |
Geographic coordinate system直译为地理坐标系统,是以经纬度为地图的存储单位的。很明显,Geographic coordinate syst em是球面坐标系统。我们要将地球上的数字化信息存放到球面坐标系统上,用经线(子午线)、纬线、经度、纬度表示地面点位。
地理坐标系一般是指由经度、纬度和高度组成的坐标系,能够标示地球上的任何一个位置。前面提到了,不同地区可能会使用不同的参考椭球体,即使是使用相同的椭球体,也可能会为了让椭球体更好地吻合当地的大地水准面,而调整椭球体的方位,甚至大小。这就需要使用不同的大地测量系统(Geodetic datum)来标识。因此,对于地球上某一个位置来说,使用不同的测量系统,得到的坐标是不一样的。我们在处理地理数据时,必须先确认数据所用的测量系统。事实上,随着我们对地球形状测量的越来越精确,北美使用的 NAD83 基准和欧洲使用的 ETRS89 基准,与 WGS 84 基准是基本一致的,甚至我国的 CGCS2000 与 WGS84 之间的差异也是非常小的。但是差异非常小,不代表完全一致,以 NAD83 为例,因为它要保证北美地区的恒定,所以它与 WGS84 之间的差异在不断变化,对于美国大部分地区来说,每年有1-2cm的差异。
地球是一个不规则的椭球,如何将数据信息以科学的方法存放到椭球上,这必然要求我们找到这样的一个椭球体。这样的椭球体具有特点:可以量化计算的,具有长半轴,短半轴,偏心率。
一般地理坐标可分为三种,天文经纬度,大地经纬度,地心经纬度。通常地图上使用的经纬度都为大地经纬度。
大地经度:参考椭球面上某点的大地子午面与本初子午面间的两面角。向东为正,向西为负。
大地纬度 :参考椭球面上某点的法线与赤道平面的夹角。向北为正,向南为负。
大地高: 指某点沿法线方向到参考椭球面的距离。
只需要参考椭球体参数以及大地基准面就可以确定地理坐标系。
以 WGS-84地理坐标系为例,定义该坐标系的参数:
1 | |
主要就是以下参数:
1 | |
在地球椭球面和平面之间建立点与点之间函数关系的数学方法,称为地图投影。这就相当于把地球当成一个橘子,然后一刀切开,把橘子皮平面铺开,这个过程就是地理投影的过程。严谨一点来说就是建立一个参考系统,按照对应位置把椭球体投射到平面。
地球椭球表面是一种不可能展开的曲面,要把这样一个曲面表现到平面上,就会发生裂隙或褶皱。在投影面上,可运用经纬线的“拉伸”或“压缩”(通过数学手段)来加以避免,以便形成一幅完整的地图。地图投影的变形通常有:长度变形、面积变形和角度变形。在实际应用中,根据使用地图的目的,限定某种变形。
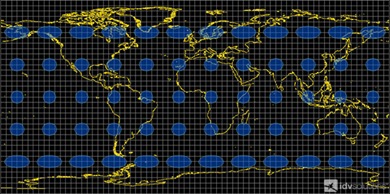
地理坐标系是三维的,我们要在地图或者屏幕上显示就需要转化为二维,这被称为 投影(Map projection)。显而易见的是,从三维到二维的转化,必然会导致变形和失真,失真是不可避免的,但是不同投影下会有不同的失真,这让我们可以有得选择。常用的投影有 等矩矩形投影(Platte Carre) 和 墨卡托投影(Mercator)。
这个例子使用天梭圆来说明墨卡托和等矩矩形投影地球的不同方式。在左边的地球仪上,假设那些蓝色的圆圈是地球上大小和形状相同 (圆形) 的想象中的岛屿。

麦卡托投影法非常明显地扭曲了物体的大小,物体离赤道越远就会越大。然而,形状保持不变 —— 那些想象中的蓝色岛屿仍然是圆的。
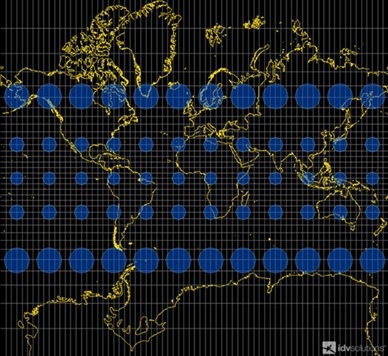
等矩矩形投影的形状发生了变化。具体来说,离赤道越远,被压扁的东西就越多。
1 | |
按变形性质分类:
等角投影:角度变形为零(Mercator),地球面上的图形在投影后保持面积不变
等积投影:面积变形为零(Albers),地球面上的图形在投影后保持面积不变
任意投影:长度、角度和面积都存在变形,既不具备等角性质,又没有等面积性质的投影。其中一特例是等距离投影,即该投影只在某些特定方向上没有变形
其中,各种变形相互联系相互影响:等积与等角互斥,等积投影角度变形大,等角投影面积变形大。
从投影面类型划分:
横圆柱投影:投影面为横圆柱
圆锥投影:投影面为圆锥
方位投影:投影面为平面
从投影面与地球位置关系划分为:
正轴投影:投影面中心轴与地轴相互重合
斜轴投影:投影面中心轴与地轴斜向相交
横轴投影:投影面中心轴与地轴相互垂直
相切投影:投影面与椭球体相切
相割投影:投影面与椭球体相割
当使用遥感影像作为主要的数据来源时,且研究区域较小时,可以使用UTM投影。由于卫星数据自带投影信息,统一采用卫星影像的投影信息即可
国内小范围地形数据目前大多采用CGCS2000坐标系,高斯克吕格投影(Gauss-Kruger)。
在这种情况下高斯克吕格投影和UTM投影就不再适用了,全国和省区往往跨了好几个3°带甚至6°带,这种情况下高斯克吕格或UTM投影的变形不再可以接受,这时就需要使用阿尔伯斯等面积投影(Albers)或兰伯特正形圆锥投影(Lambert)。
EPSG(The European Petroleum Survey Group)发布并维护着一套公用的坐标参考系统(Coordinate System)数据集参数,其坐标参考系统的编码通常称为 EPSG Code,因使用简单而成为最常用的坐标参考系表达方式。
投影分带使用的规定
北半球地区,选择最后字母为“N”的带,南半球“S”
带号=(经度整数位/6)的整数部分+31
| 带号 | 经度范围(东经) | 中央经线经度 |
|---|---|---|
| 43N | 72°-78° | 75° |
| 44N | 78°-84° | 81° |
| 45N | 84°-90° | 87° |
| 46N | 90°-96° | 93° |
| 47N | 96°-102° | 99° |
| 48N | 102°-108° | 105° |
| 49N | 108°-114° | 111° |
| 50N | 114°-120° | 117° |
| 51N | 120°-126° | 123° |
| 52N | 126°-132° | 129° |
| 53N | 132°-138° | 135° |
6度带带号=(经度+6°)/6取整
从格林尼治零度经线起,自东半球向西半球, 每经差6°分为一个投影带, 即东经0~6, 6~12, 12~18, ….174~180,用阿拉伯数字1, 2, 3, 4, ….60表示投影带号, 全球共分为60个投影带。
东半球中央经线的计算公式为:
西半球中央经线的计算公式为:
3度带带号=(经度+1.5°)/3取整
从东经1°30′算起,自东半球向西半球每3°为一带,将全球划分为120个投影带,1°30′−4°30′,4°30′−7°30′….其中央经线的位置为3°,6°,9°,15°…180°,−177°…−3°
东半球中央经线的计算公式为:
西半球中央经线的计算公式为:
文章链接:
https://www.zywvvd.com/notes/study/gis/gis-knowledge-coor/gis-knowledge-coor/
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。