图像慧差
Yiwei Zhang
·
2022-11-15
·
via 又见苍岚
慧差是光学镜头的一种缺陷,本文介绍相关概念。
简介
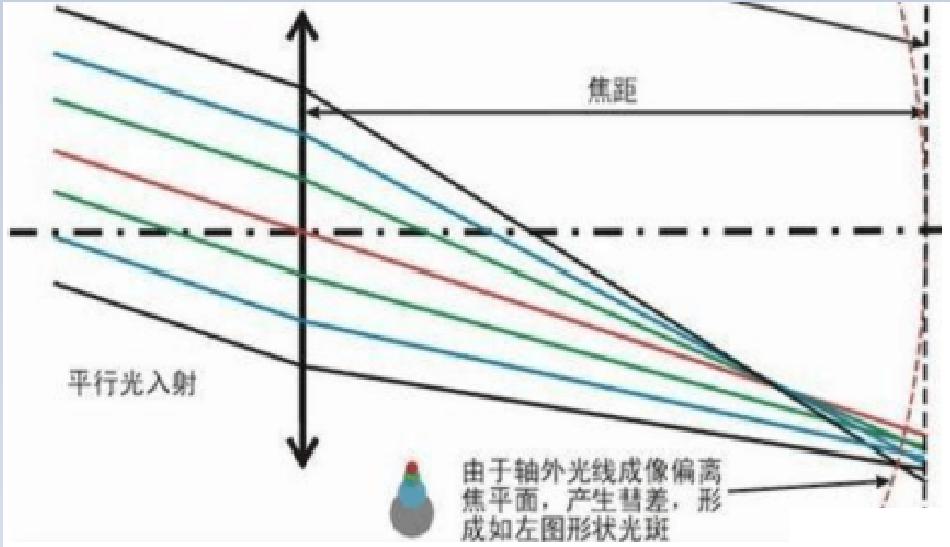
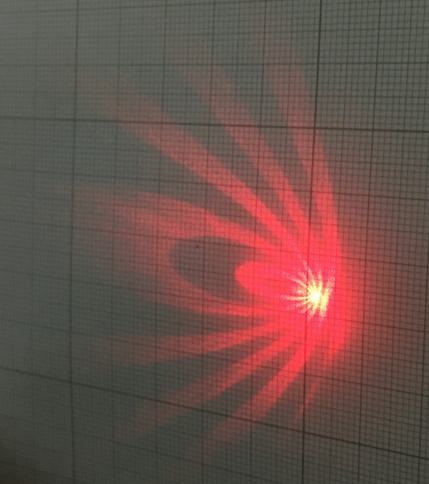
- 慧差,也叫慧形像差(Coma Aberration),是轴外物点(或称轴外视场点)所发出的锥形光束通过光学系统成像后,在理想像面不能成完美的像点,而是形成拖着尾巴的如慧星形状的光斑 。
产生原因
- 慧差是由光学系统主平面的曲率引起的,慧形像差中的慧星状形状是由于光线穿过透镜的各个区域时的折射差异。
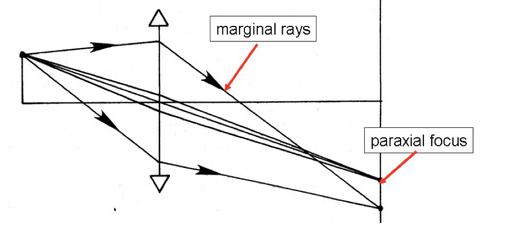
- 球面透镜各光区成像的放大率不一致,导致各光区的焦点不同。是由轴外点宽光束的主光线与球面对称轴不重合,而由折射球面的球差引起的。
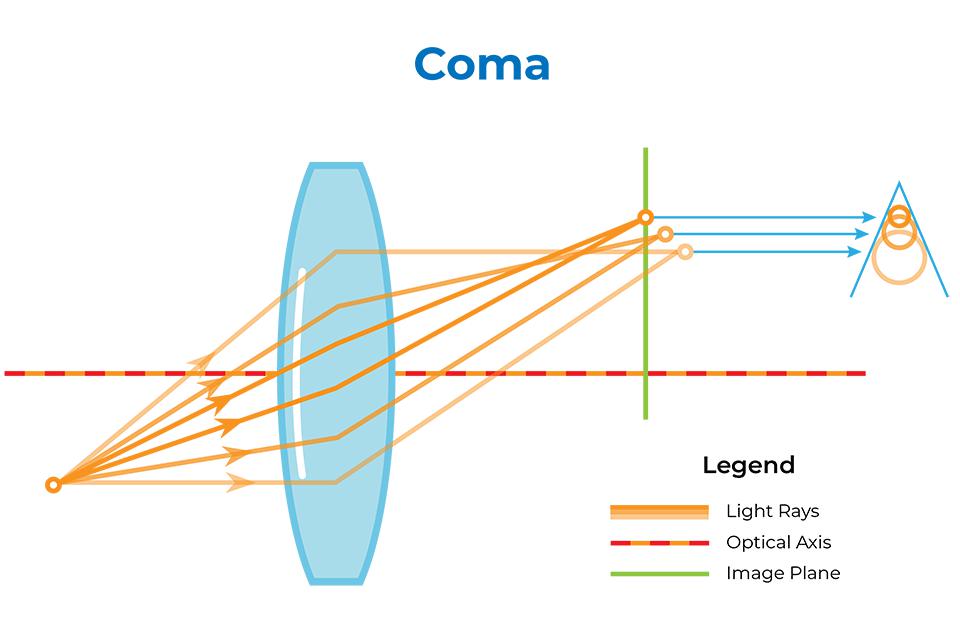
- 畸变的程度取决于薄透镜的形状。在没有任何像差的情况下,穿过镜头的光线将在镜头后面的焦点处会聚。在离轴区域穿过的光线会产生不同的横向放大率。当来自物体的光线以斜角进入镜头时,慧差变得明显,导致图像离轴。
慧差分类
- 慧差分为负慧差和正慧差。
- 当外围光线产生最小图像时,慧形像差称为负慧差。在外围光线进一步聚焦在轴下方的情况下,导致更大的放大倍率,慧形像差被称为正慧差。
- 在负慧差情况下,慧尾指向远离视场中心,而在正慧差情况下,慧尾指向视场。强凹正弯月透镜会导致负慧差,而双凸或平凸透镜会导致负慧差为零。当通过平凸透镜或凸弯月透镜的凸面观察物体时,会出现正慧差。
消除慧差的方法
- 设计光学系统时,使用不同曲率的透镜的组合来加以矫正慧差
- 缩小光圈
如果镜片是用作相机的镜头,存在慧差的摄影镜头,将严重影响成像的清晰度。我们在拍摄时也可以适当采用较小的光圈(孔径)来减少慧差对成像的影响。
- 入瞳位置设置在球心处
光阑移动对球差没影响,但对像散和慧差有影响,但当球差为零时,慧差与光阑的位置无关。
参考资料
文章链接:
https://www.zywvvd.com/notes/study/camera-imaging/coma-aberration/coma-aberration/
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。