UTM(Universal Transverse Mercator Grid System, 通用横墨卡托网格系统),本文记录相关内容。
背景
UTM投影为美国陆军工程兵测绘局(Army Map Service,US Army Corps of Engineers)于20世纪40年代提出(Langley,1998)。当时对美国本土采用Clarke 1866椭球体,对全球其它地方,包括夏威夷,采用国际椭球体(International Ellipsoid)。UTM投影现在采用WGS(World Geodetic System)84椭球体(其最新版为2004年修订的EGM(Earth Gravitational Model)。
简介
UTM(Universal Transverse Mercator Grid System,通用横墨卡托格网系统)坐标是一种平面直角坐标,这种坐标格网系统及其所依据的投影已经广泛用于地形图,作为卫星影像和自然资源数据库的参考格网以及要求精确定位的其他应用。
UTM投影参数
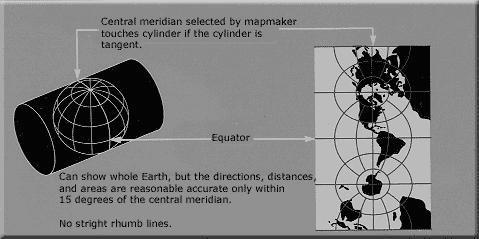
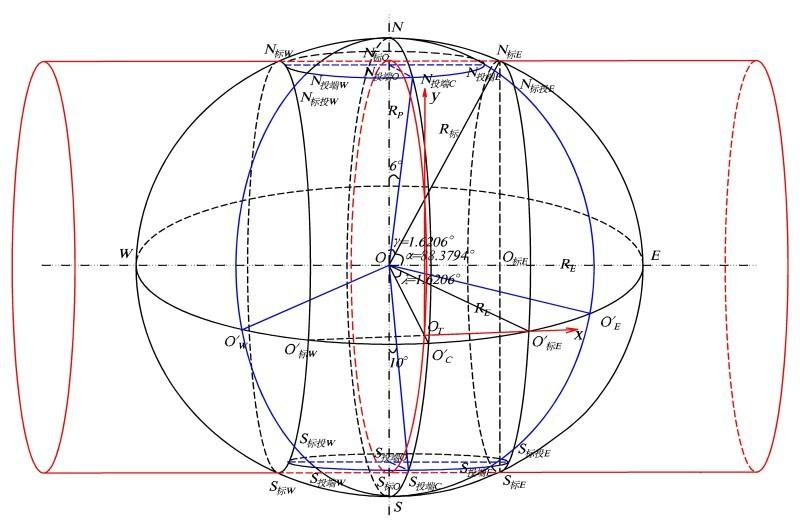
UTM投影为 椭圆柱横正轴割地球椭球体 ,是一种“等角横轴割圆柱投影”,椭圆柱的中心线位于椭球体赤道面上,且通过椭球体质点。从而将椭球体上的点投影到椭圆柱上。椭圆柱割地球于南纬80度、北纬84度两条等高圈。
两条割线圆在UTM投影图上长度无变,即2条标准经线圆。两条割线圆之正中间为中央经线圆,中央经线投影后的长度为其投影前的0.9996倍,比例因子k=投影后的长度/投影前的实际长度。则标准割线和中央经线的经度差为1.6206°,即1°37′14.244″。
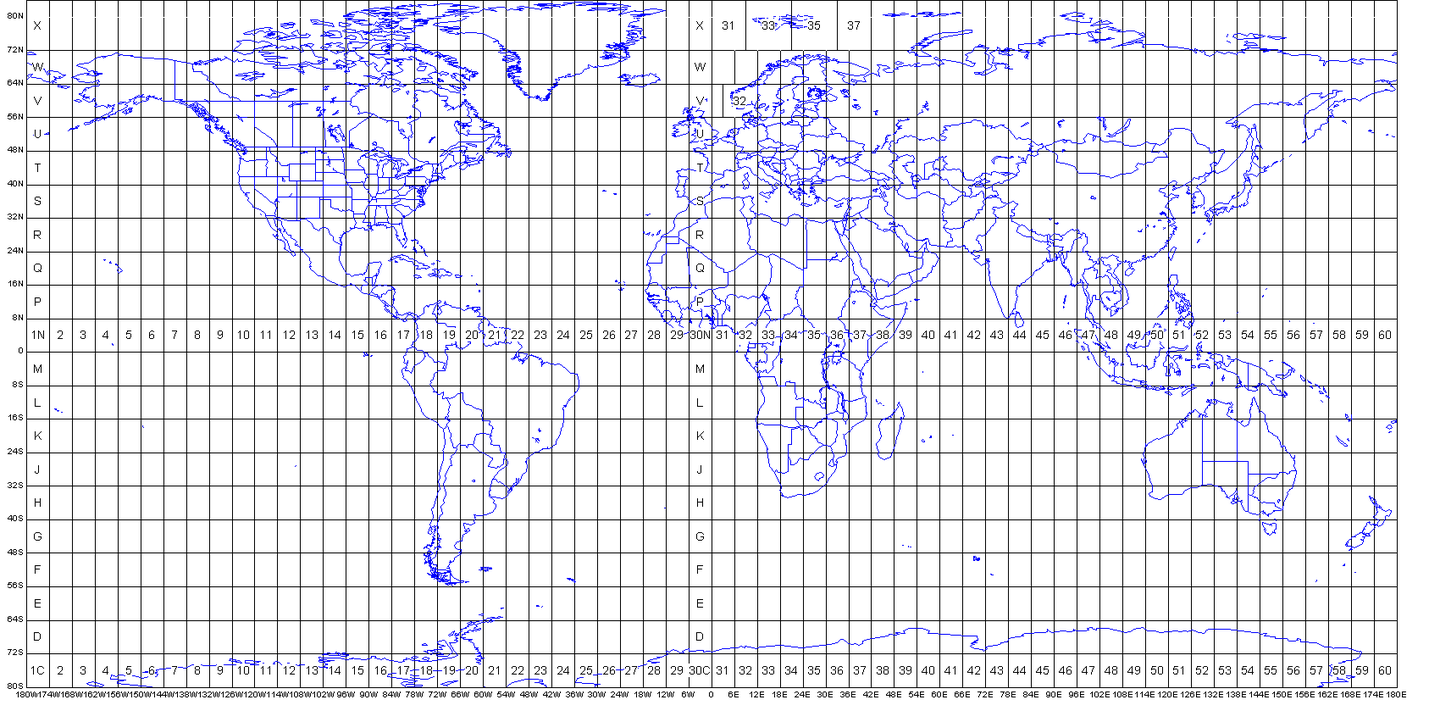
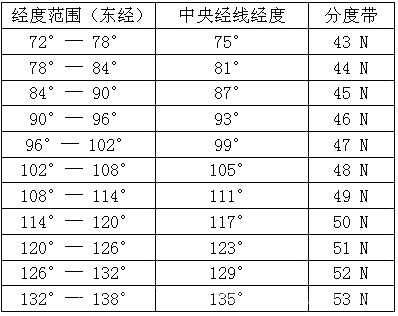
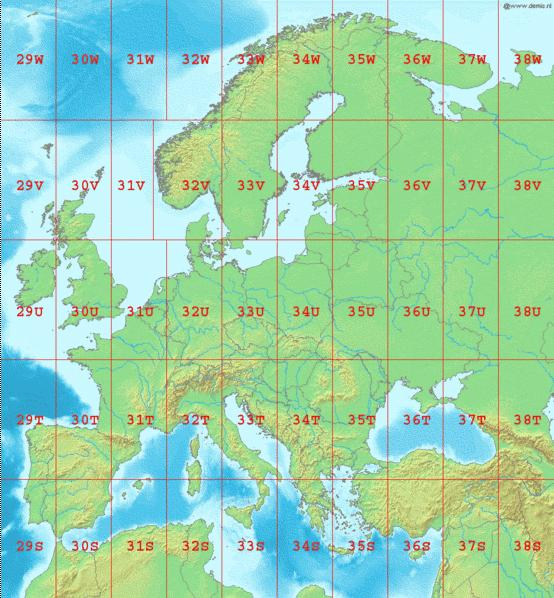
UTM投影分带
UTM 经度区范围为1到60,其中58个区的东西跨度为 6°。经度区涵盖了地球中纬度范围从 80°S 到 84°N 之间的所有区域。
一共有 20个UTM 纬度区,每个区的南北跨度为 8°;使用字母 C 到 X 标识(其中没有字母 I 和 O)。A、B、Y、Z 区不在系统范围以内,它们覆盖了南极和北极区。
UTM坐标表示格式
UTM 坐标的表示格式为:经度区纬度区以东以北,其中以东表示从经度区的中心子午线的投影距离,而以北表示距离赤道的投影距离。这个两个值的单位均为米。
UTM坐标的一般形式为:11U 358657m E 5885532m N
11 表示位于经度11区U 表示位于纬度U区358657m E 表示东向位置为358657m5885532m N 表示北向位置为5885532m
举例来说:
使用 UTM 表示经/纬度坐标 61.44,25.40 的结果就是35V 414668 6812844;
而经/纬度坐标 -47.04,-73.48 的表示结果为18G 615471 4789269。
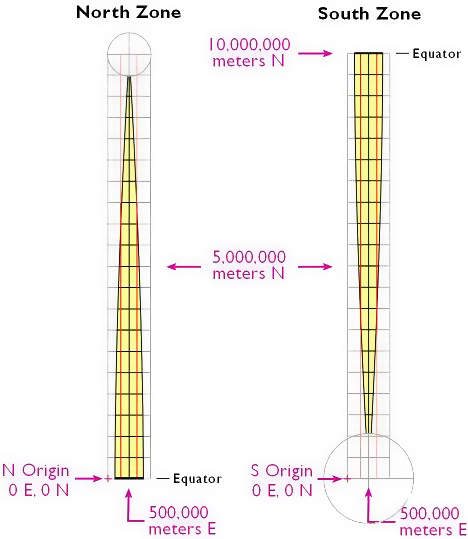
UTM的东向位置和北向位置定义如下:
东向位置
每个经度区均有一条中心经线,如11区的经度范围为120W-114W,则其中心经线为117W。
中心经线以东的点到中心经线距离为正,中心经线以西的点到中心经线距离为负。
则某点的东向位置即为该点到中心经线的距离加500,000m。
例如: 中心经线以东8m的点的东向位置为:500,000 + 8 = 500,008m
中心经线以西350m的点的东向位置为:500,000 - 350 = 499,650m
加500,000m的好处是保证一个经度区内的所有点的东向位置均为6位正数。
北向位置
北半球北向位置即为该点到赤道的距离。
南半球北向位置为10,000,000m减去该点到赤道的距离。
例如:赤道以北34m的点的北向位置为:34m
赤道以南34m的点的南向位置为:10,000,000 - 34 = 9,999,966m
所有点的北向位置也是正数。
EPSG UTM 编号
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 PCS_WGS84_UTM_zone_1N = 32601 PCS_WGS84_UTM_zone_2N = 32602 PCS_WGS84_UTM_zone_3N = 32603 PCS_WGS84_UTM_zone_4N = 32604 PCS_WGS84_UTM_zone_5N = 32605 PCS_WGS84_UTM_zone_6N = 32606 PCS_WGS84_UTM_zone_7N = 32607 PCS_WGS84_UTM_zone_8N = 32608 PCS_WGS84_UTM_zone_9N = 32609 PCS_WGS84_UTM_zone_10N = 32610 PCS_WGS84_UTM_zone_11N = 32611 PCS_WGS84_UTM_zone_12N = 32612 PCS_WGS84_UTM_zone_13N = 32613 PCS_WGS84_UTM_zone_14N = 32614 PCS_WGS84_UTM_zone_15N = 32615 PCS_WGS84_UTM_zone_16N = 32616 PCS_WGS84_UTM_zone_17N = 32617 PCS_WGS84_UTM_zone_18N = 32618 PCS_WGS84_UTM_zone_19N = 32619 PCS_WGS84_UTM_zone_20N = 32620 PCS_WGS84_UTM_zone_21N = 32621 PCS_WGS84_UTM_zone_22N = 32622 PCS_WGS84_UTM_zone_23N = 32623 PCS_WGS84_UTM_zone_24N = 32624 PCS_WGS84_UTM_zone_25N = 32625 PCS_WGS84_UTM_zone_26N = 32626 PCS_WGS84_UTM_zone_27N = 32627 PCS_WGS84_UTM_zone_28N = 32628 PCS_WGS84_UTM_zone_29N = 32629 PCS_WGS84_UTM_zone_30N = 32630 PCS_WGS84_UTM_zone_31N = 32631 PCS_WGS84_UTM_zone_32N = 32632 PCS_WGS84_UTM_zone_33N = 32633 PCS_WGS84_UTM_zone_34N = 32634 PCS_WGS84_UTM_zone_35N = 32635 PCS_WGS84_UTM_zone_36N = 32636 PCS_WGS84_UTM_zone_37N = 32637 PCS_WGS84_UTM_zone_38N = 32638 PCS_WGS84_UTM_zone_39N = 32639 PCS_WGS84_UTM_zone_40N = 32640 PCS_WGS84_UTM_zone_41N = 32641 PCS_WGS84_UTM_zone_42N = 32642 PCS_WGS84_UTM_zone_43N = 32643 PCS_WGS84_UTM_zone_44N = 32644 PCS_WGS84_UTM_zone_45N = 32645 PCS_WGS84_UTM_zone_46N = 32646 PCS_WGS84_UTM_zone_47N = 32647 PCS_WGS84_UTM_zone_48N = 32648 PCS_WGS84_UTM_zone_49N = 32649 PCS_WGS84_UTM_zone_50N = 32650 PCS_WGS84_UTM_zone_51N = 32651 PCS_WGS84_UTM_zone_52N = 32652 PCS_WGS84_UTM_zone_53N = 32653 PCS_WGS84_UTM_zone_54N = 32654 PCS_WGS84_UTM_zone_55N = 32655 PCS_WGS84_UTM_zone_56N = 32656 PCS_WGS84_UTM_zone_57N = 32657 PCS_WGS84_UTM_zone_58N = 32658 PCS_WGS84_UTM_zone_59N = 32659 PCS_WGS84_UTM_zone_60N = 32660
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 PCS_WGS84_UTM_zone_1S = 32701 PCS_WGS84_UTM_zone_2S = 32702 PCS_WGS84_UTM_zone_3S = 32703 PCS_WGS84_UTM_zone_4S = 32704 PCS_WGS84_UTM_zone_5S = 32705 PCS_WGS84_UTM_zone_6S = 32706 PCS_WGS84_UTM_zone_7S = 32707 PCS_WGS84_UTM_zone_8S = 32708 PCS_WGS84_UTM_zone_9S = 32709 PCS_WGS84_UTM_zone_10S = 32710 PCS_WGS84_UTM_zone_11S = 32711 PCS_WGS84_UTM_zone_12S = 32712 PCS_WGS84_UTM_zone_13S = 32713 PCS_WGS84_UTM_zone_14S = 32714 PCS_WGS84_UTM_zone_15S = 32715 PCS_WGS84_UTM_zone_16S = 32716 PCS_WGS84_UTM_zone_17S = 32717 PCS_WGS84_UTM_zone_18S = 32718 PCS_WGS84_UTM_zone_19S = 32719 PCS_WGS84_UTM_zone_20S = 32720 PCS_WGS84_UTM_zone_21S = 32721 PCS_WGS84_UTM_zone_22S = 32722 PCS_WGS84_UTM_zone_23S = 32723 PCS_WGS84_UTM_zone_24S = 32724 PCS_WGS84_UTM_zone_25S = 32725 PCS_WGS84_UTM_zone_26S = 32726 PCS_WGS84_UTM_zone_27S = 32727 PCS_WGS84_UTM_zone_28S = 32728 PCS_WGS84_UTM_zone_29S = 32729 PCS_WGS84_UTM_zone_30S = 32730 PCS_WGS84_UTM_zone_31S = 32731 PCS_WGS84_UTM_zone_32S = 32732 PCS_WGS84_UTM_zone_33S = 32733 PCS_WGS84_UTM_zone_34S = 32734 PCS_WGS84_UTM_zone_35S = 32735 PCS_WGS84_UTM_zone_36S = 32736 PCS_WGS84_UTM_zone_37S = 32737 PCS_WGS84_UTM_zone_38S = 32738 PCS_WGS84_UTM_zone_39S = 32739 PCS_WGS84_UTM_zone_40S = 32740 PCS_WGS84_UTM_zone_41S = 32741 PCS_WGS84_UTM_zone_42S = 32742 PCS_WGS84_UTM_zone_43S = 32743 PCS_WGS84_UTM_zone_44S = 32744 PCS_WGS84_UTM_zone_45S = 32745 PCS_WGS84_UTM_zone_46S = 32746 PCS_WGS84_UTM_zone_47S = 32747 PCS_WGS84_UTM_zone_48S = 32748 PCS_WGS84_UTM_zone_49S = 32749 PCS_WGS84_UTM_zone_50S = 32750 PCS_WGS84_UTM_zone_51S = 32751 PCS_WGS84_UTM_zone_52S = 32752 PCS_WGS84_UTM_zone_53S = 32753 PCS_WGS84_UTM_zone_54S = 32754 PCS_WGS84_UTM_zone_55S = 32755 PCS_WGS84_UTM_zone_56S = 32756 PCS_WGS84_UTM_zone_57S = 32757 PCS_WGS84_UTM_zone_58S = 32758 PCS_WGS84_UTM_zone_59S = 32759 PCS_WGS84_UTM_zone_60S = 32760
参考资料
文章链接:https://www.zywvvd.com/notes/study/gis/gis-utm/gis-utm/