Halcon 的 Hdevelop 可以快速编写算子开发图像处理算法,本文记录将 Hdevelop 代码导出到 C++ 应用程序的方法。
1 | |
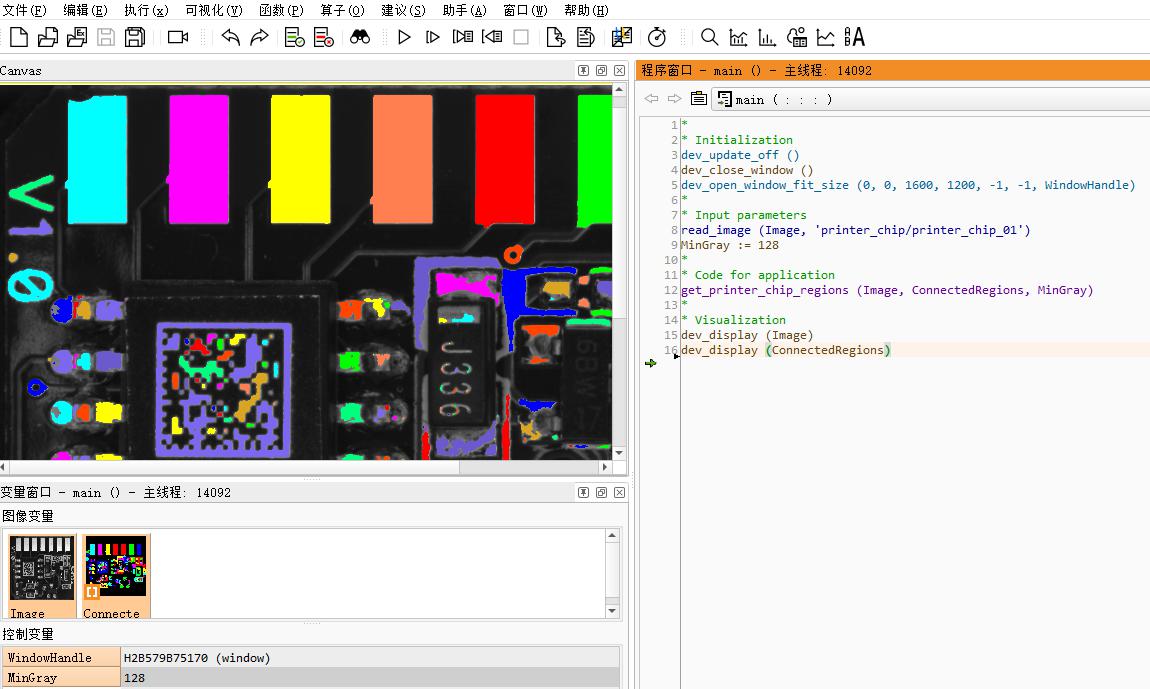
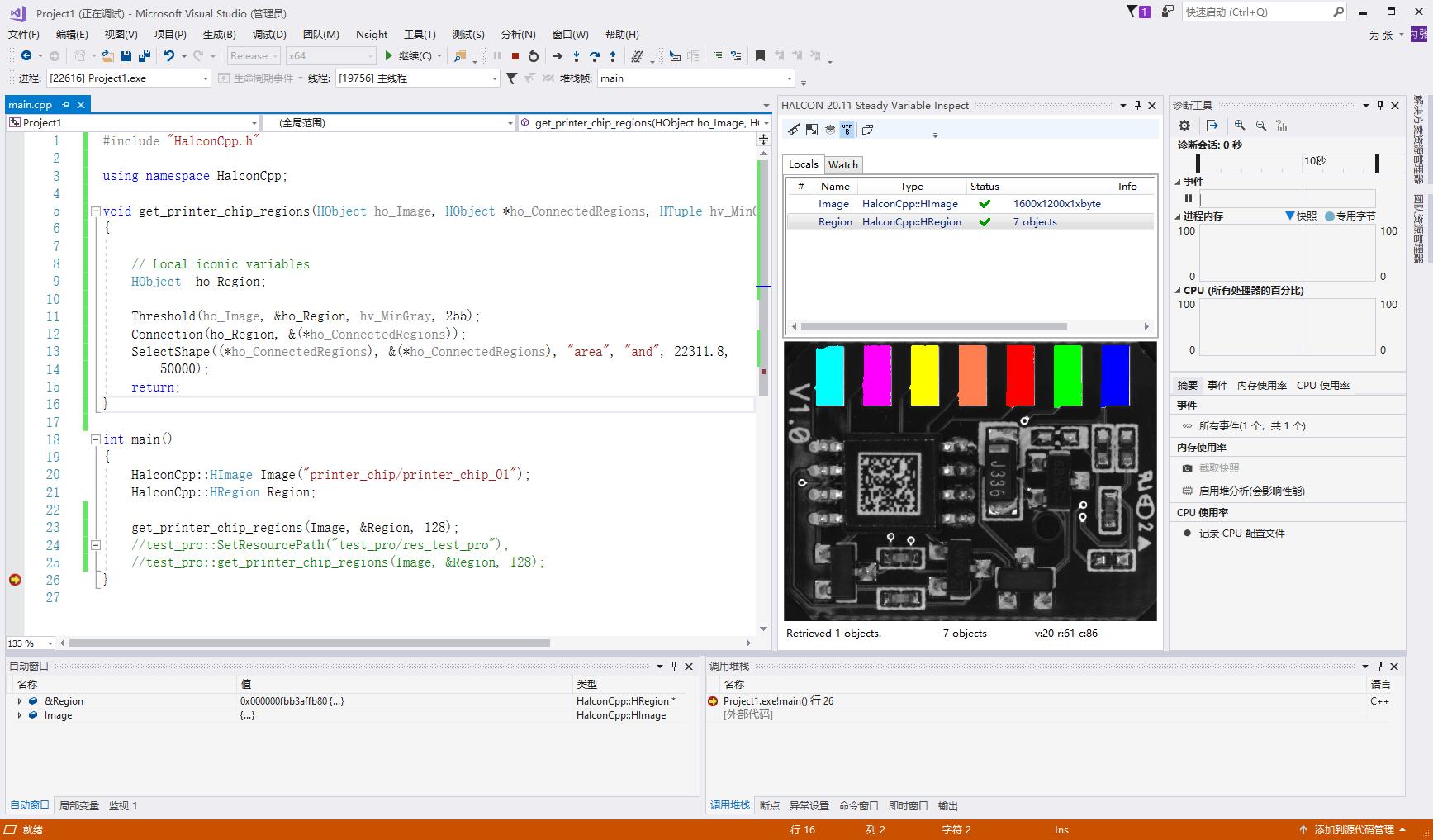
get_printer_chip_regions 代码1 | |

cmake,source 和原始的 halcon 工程文件 *.hdev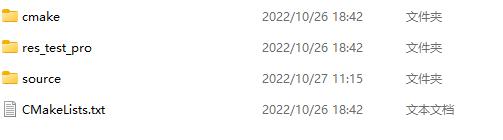
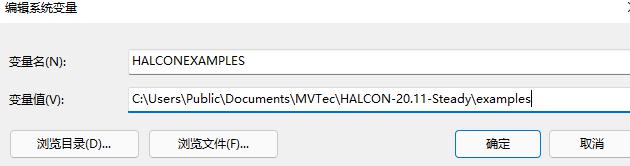
首先需要 配置好 Halcon 环境变量
1 | |
SetResourcePath("test_pro/res_test_pro") 指向导出的 halcon 工程 hdev 文件所在文件夹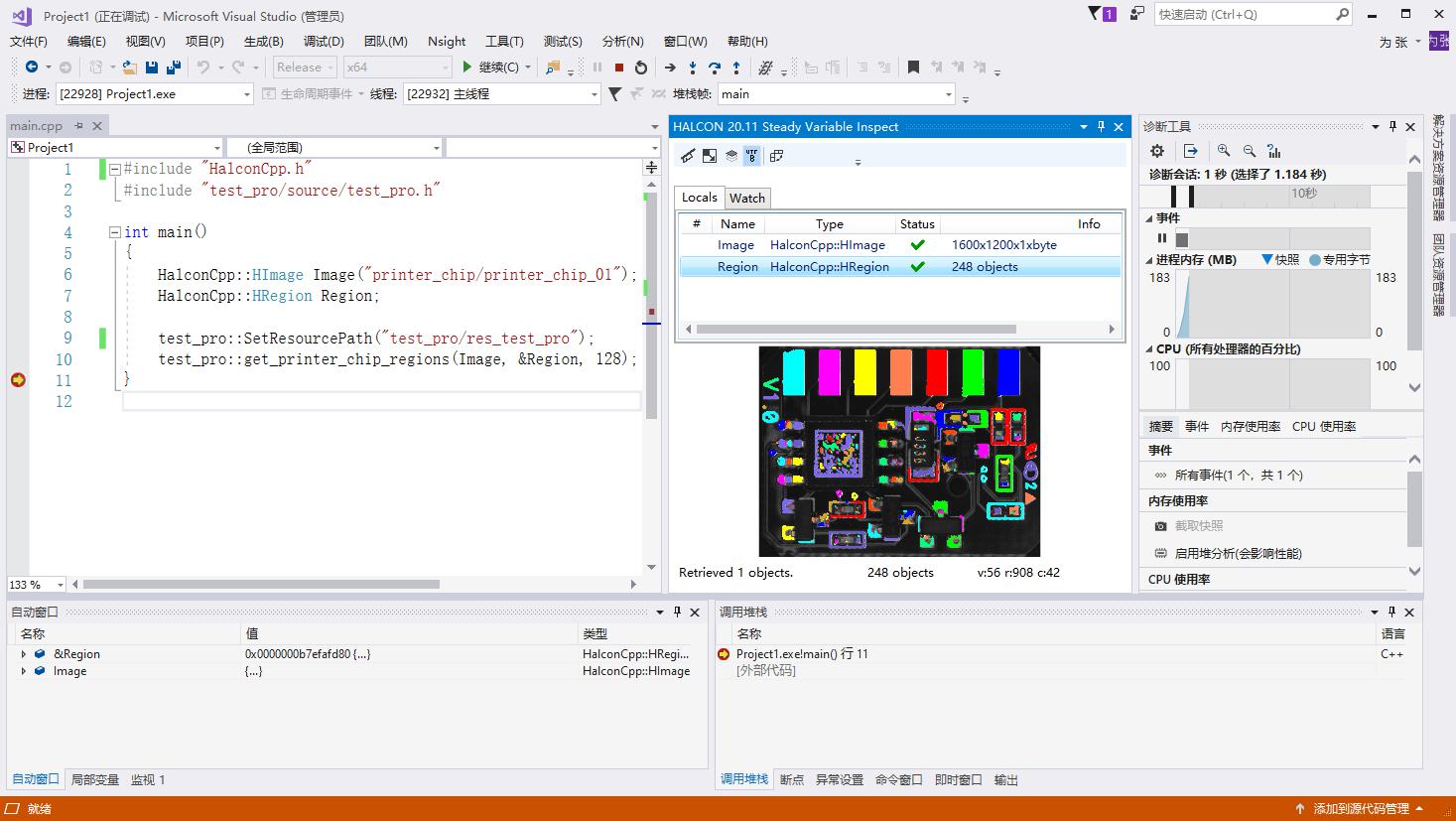
通过 Halcon 导出工程 植入 VS 的代码有个好处是修改 Halcon 代码后不需要重新编译 VS C++ 工程即可达到修改的效果
如果需要修改 Halcon 代码,我们可以直接去调整导出的 hdev 代码
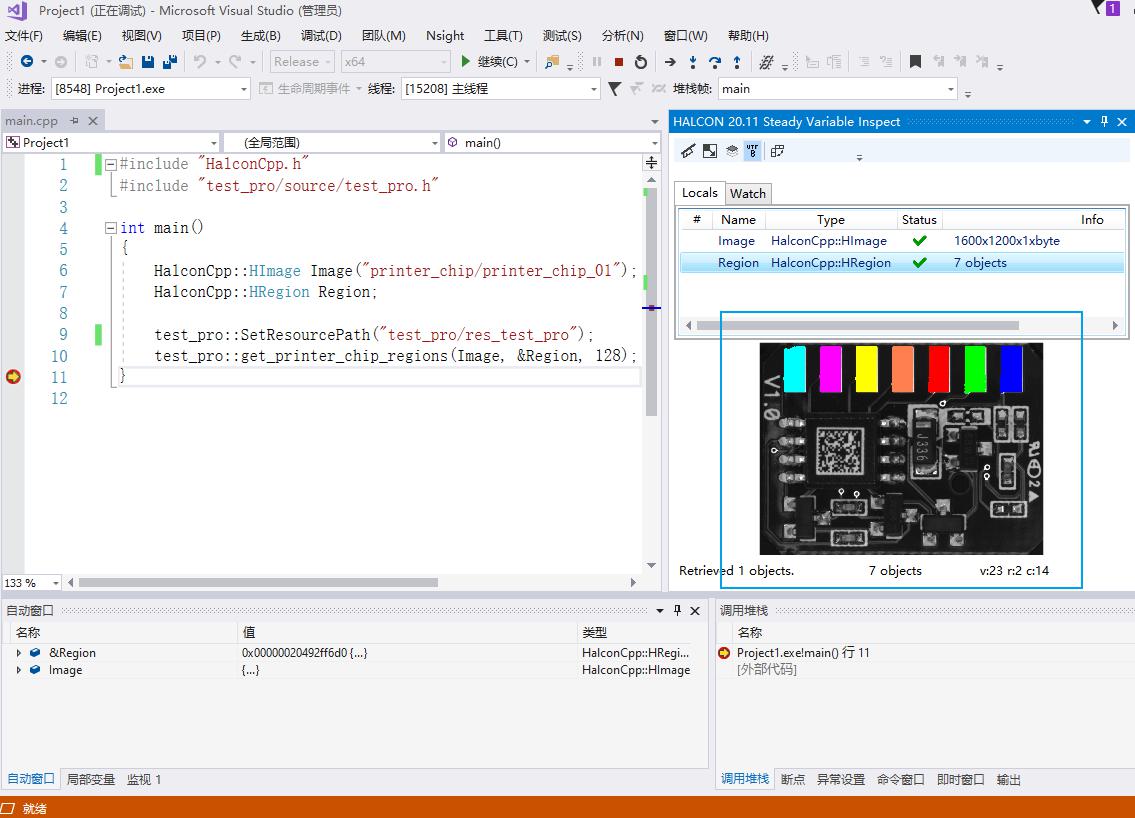
例如我们仅筛选出比较大的区域
修改导出 hdev 的函数代码,添加筛选连通域的语句,保存工程
1 | |
1 | |
Halcon 也支持直接导出代码
同样的示例,我们在导出时选择导出语言
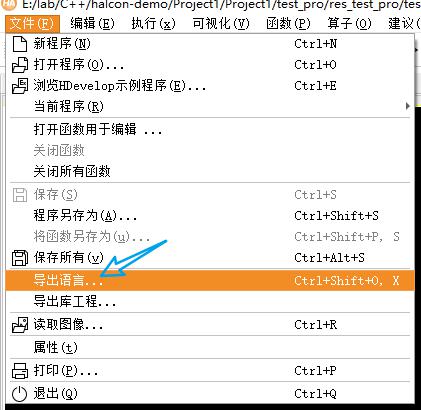

导出后发现在原始 hdev 文件旁边多了个 cpp 文件,就是我们导出的代码
在 Halcon 工程中我们核心的函数就是 get_printer_chip_regions
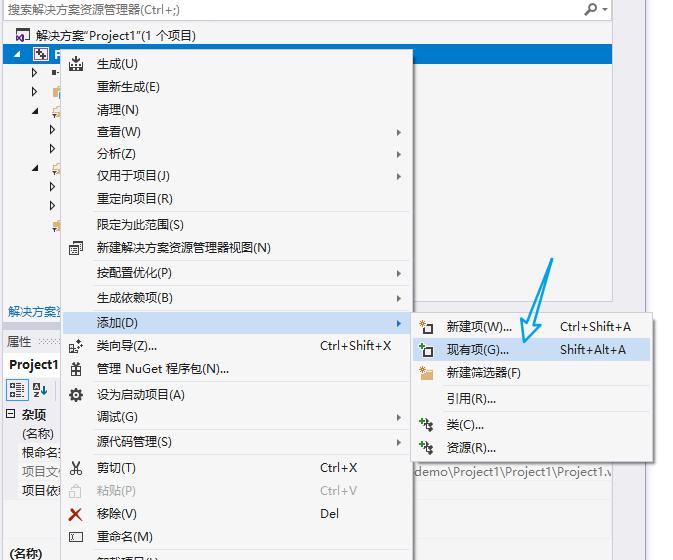
我们在 cpp 文件中找到他
1 | |
1 | |
文章链接:
https://www.zywvvd.com/notes/coding/halcon/halcon-cpp-insert/halcon-cpp/
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。