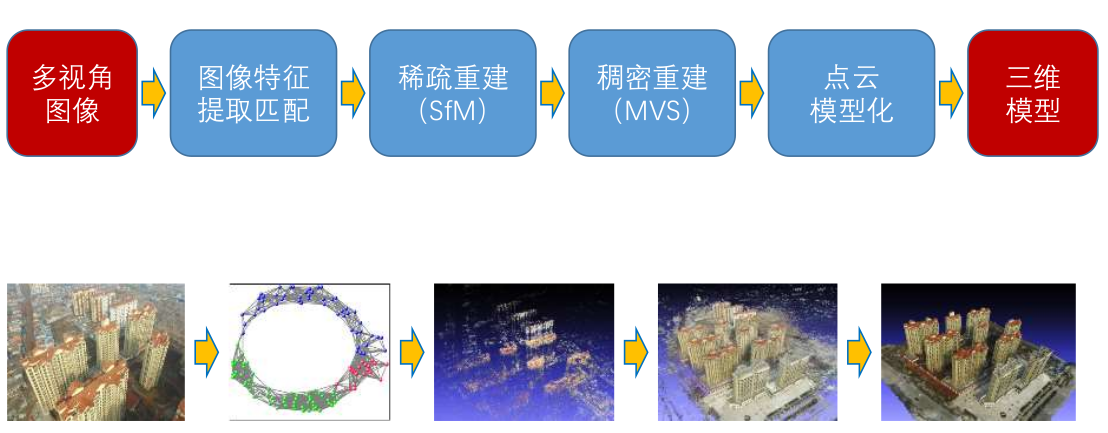
中科院自动化所模式识别国重实验室的申抒含老师和崔海楠老师的关于基于凸显的大规模场景三维重建的讲习班中分享了很棒的课件资料,本文记录相关内容。
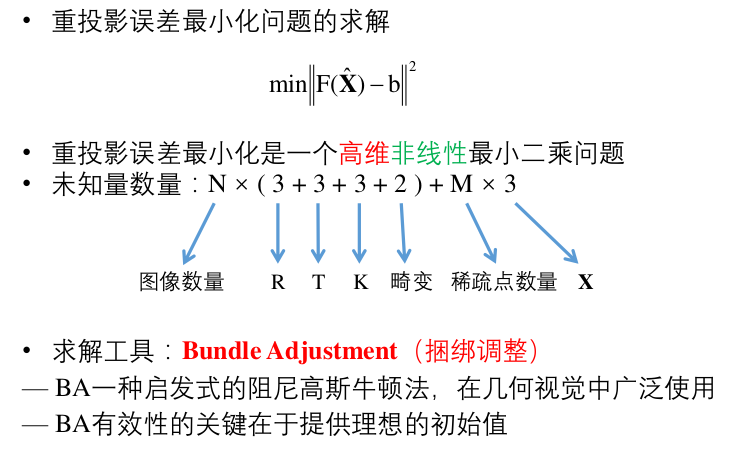
求解思路为最小化重投影误差平方和
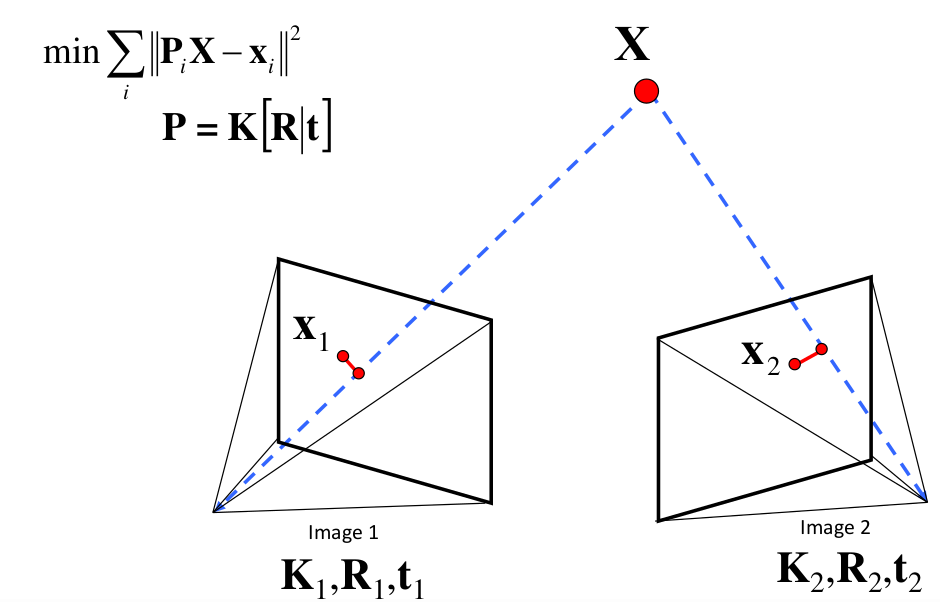
接着推导就可以写成 $𝐹(\hat{𝑋})−𝑏$ 的形式。

这样求解重投影误差最小化问题是一个高维非线性最小二乘问题。未知数数量由图像数量乘以旋转矩阵、平移向量、内参数、畸变加上稀疏点数目乘以世界坐标X。
特征提取采用 SIFT 特征
特征点匹配:
L2范数距离最小
比值约束:最近邻/次近邻小于一定阈值
外极几何约束(匹配特征点在对应的外极线附近)
匹配难点
候选图像匹配对非常多。这里介绍了一篇解决这个问题的论文。
通过聚类、建树、匹配。(K-means层级树)
可以把复杂度降到线性。
误匹配问题(用Loop约束来去除错误外极几何关系)。
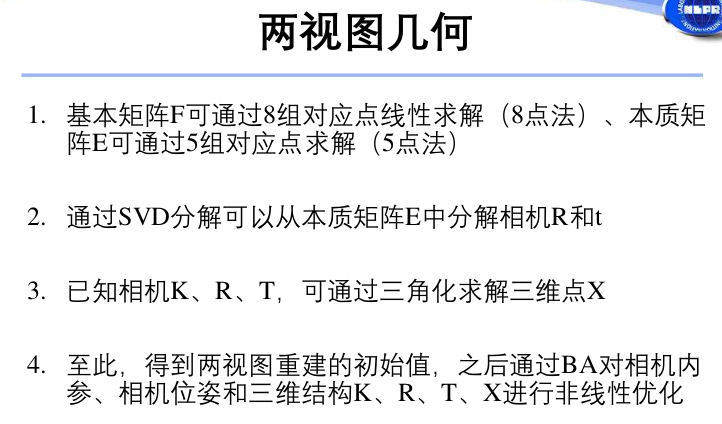
本质矩阵分解:三角化选择内点最多的一组配置作为外极几何关系。
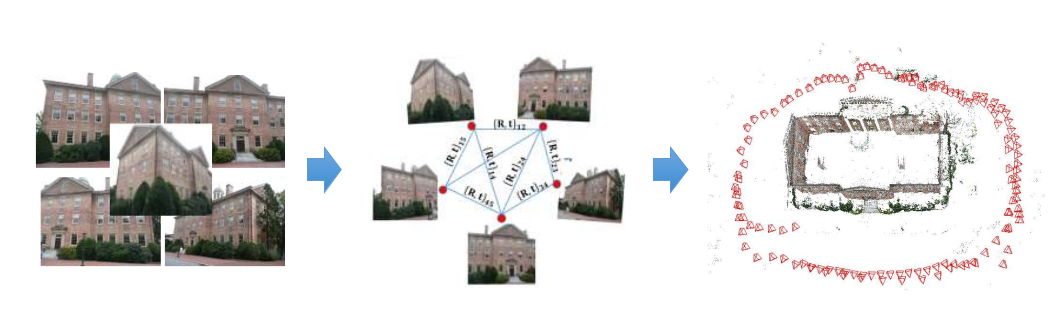
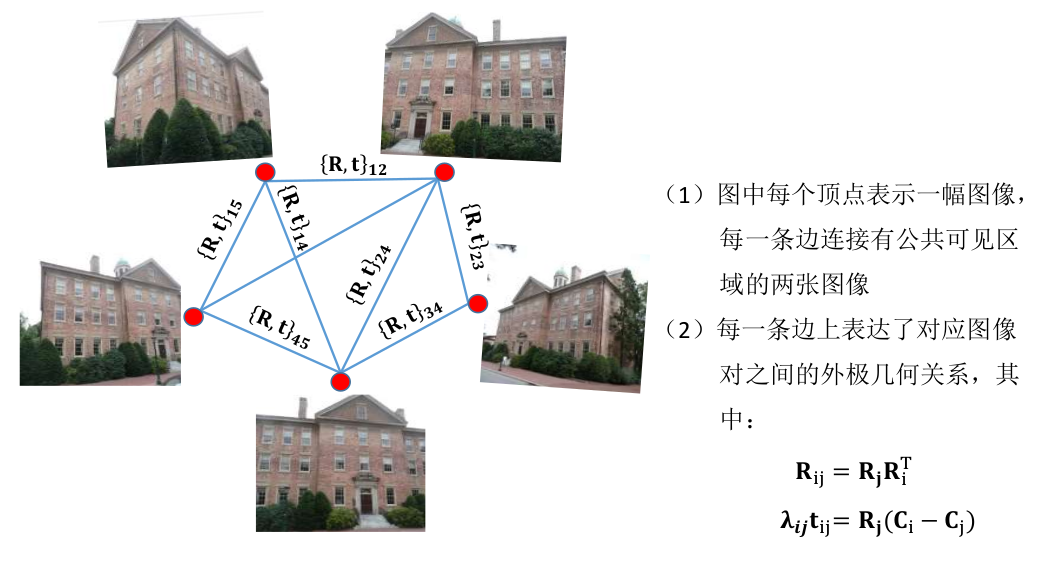
外极几何图构建
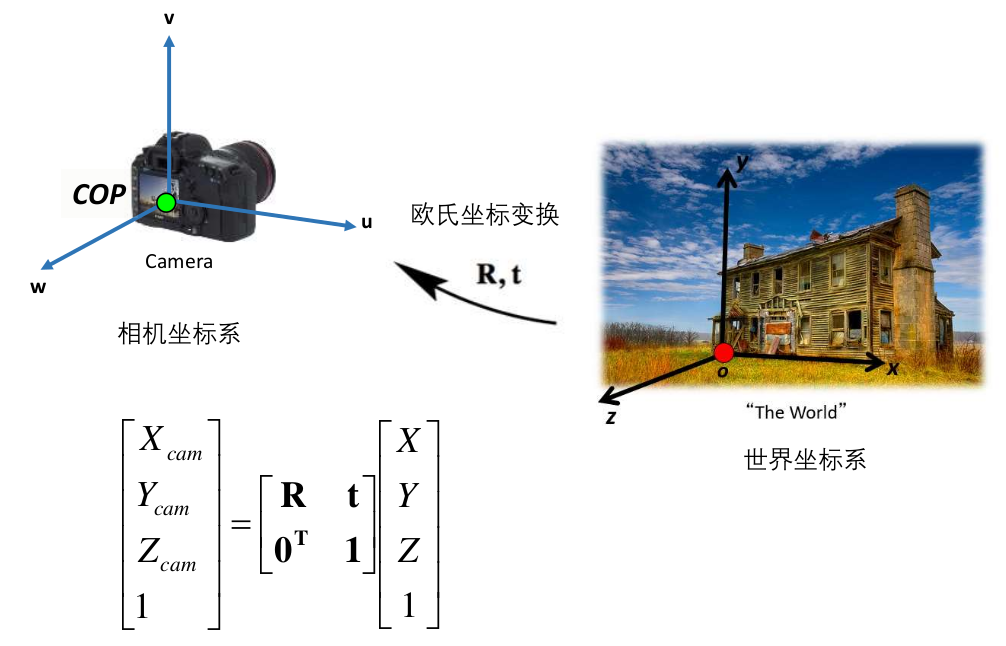
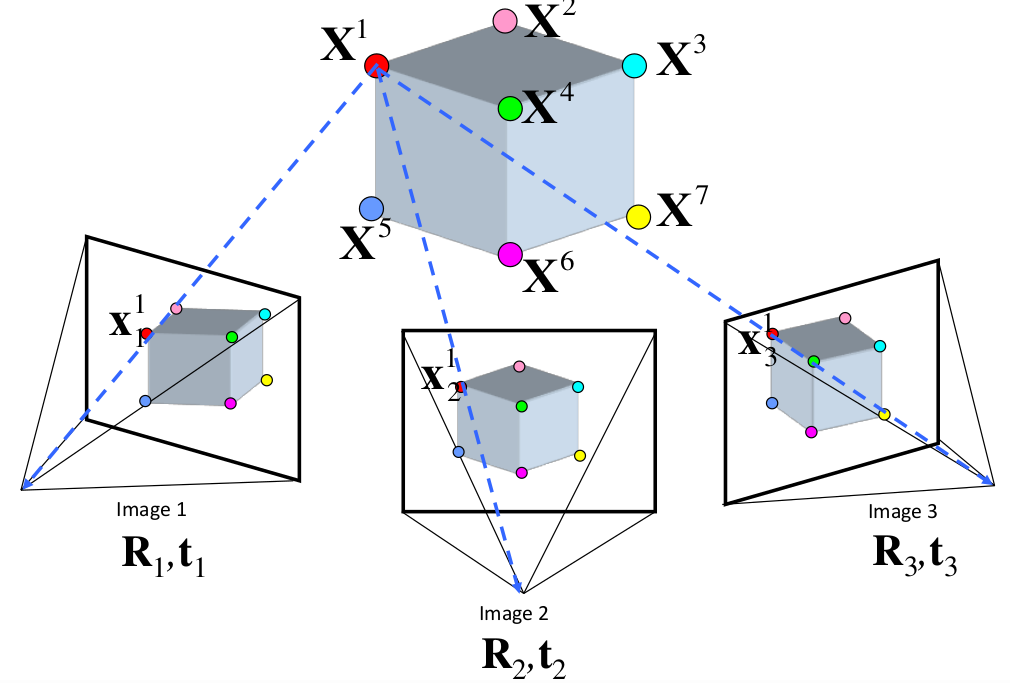
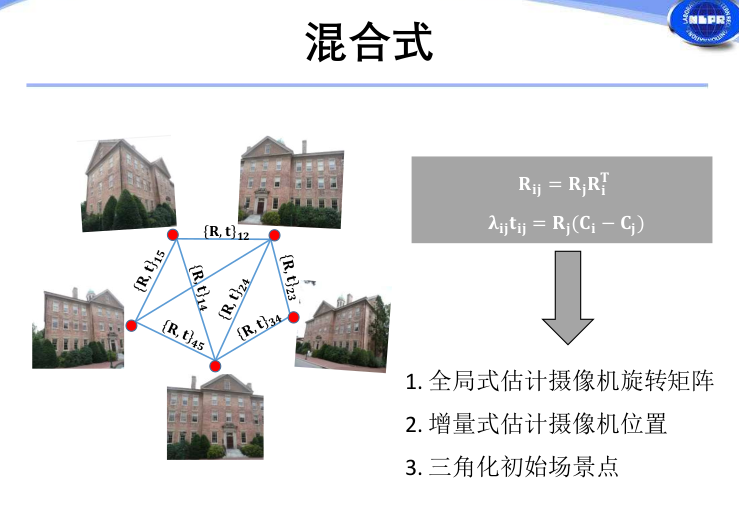
摄像机位姿和场景结构估计
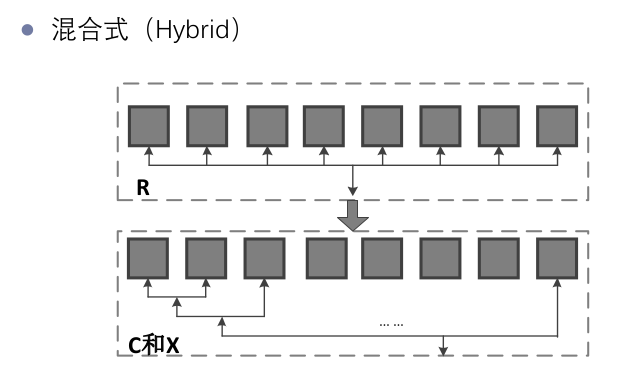
包括三种方法:
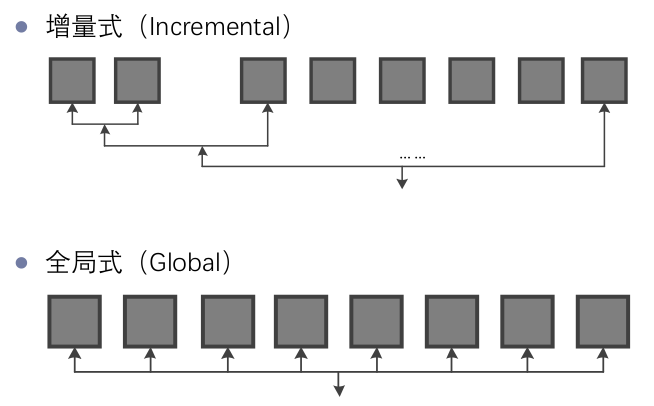
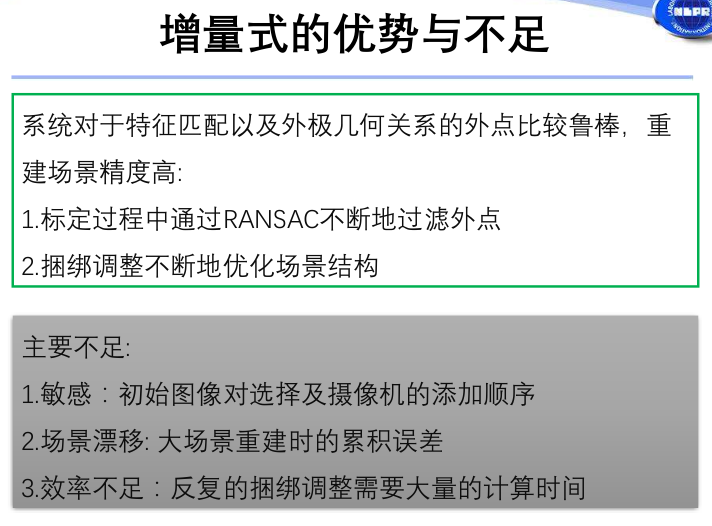
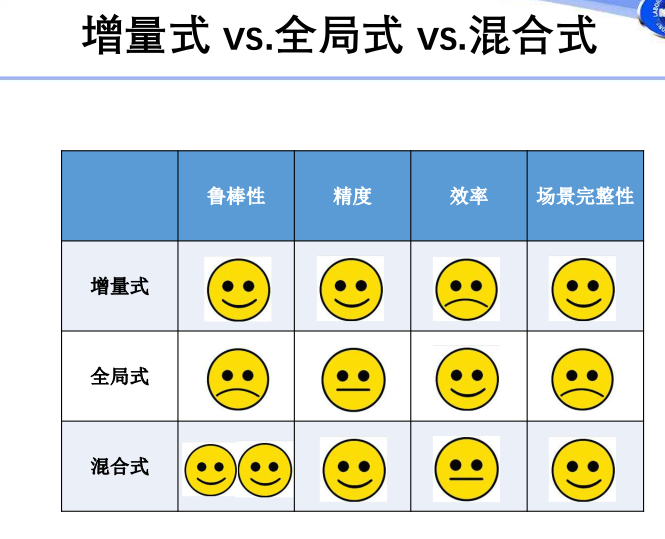
增量式的优缺点:
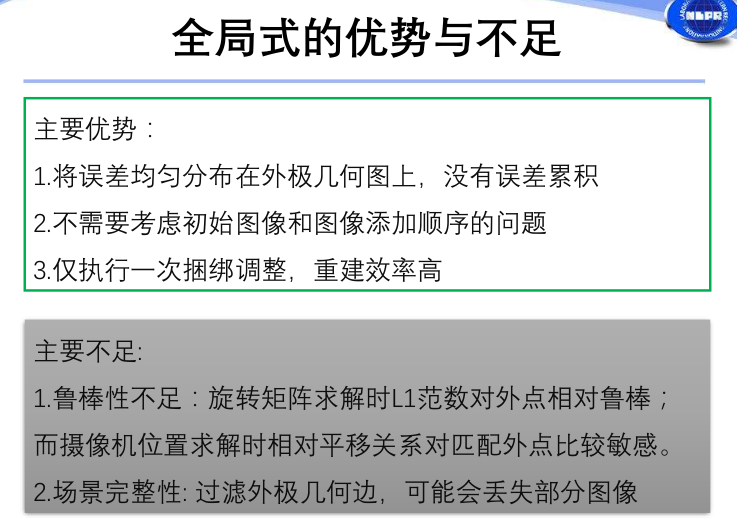
全局式的优缺点:
混合式的优缺点:
三者定性对比:
文章链接:
https://www.zywvvd.com/notes/3d/reconstruction/reconstruction-3d/
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。