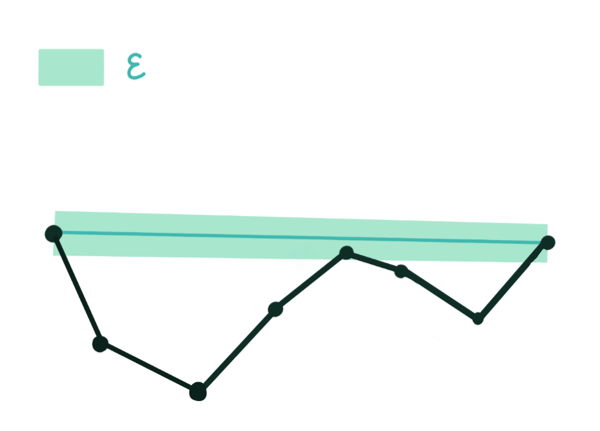
function DouglasPeucker(PointList[], epsilon) // Find the point with the maximum distance dmax = 0 index = 0 end = length(PointList) for i = 2 to (end - 1) { d = perpendicularDistance(PointList[i], Line(PointList[1], PointList[end])) if (d > dmax) { index = i dmax = d } }
ResultList[] = empty;
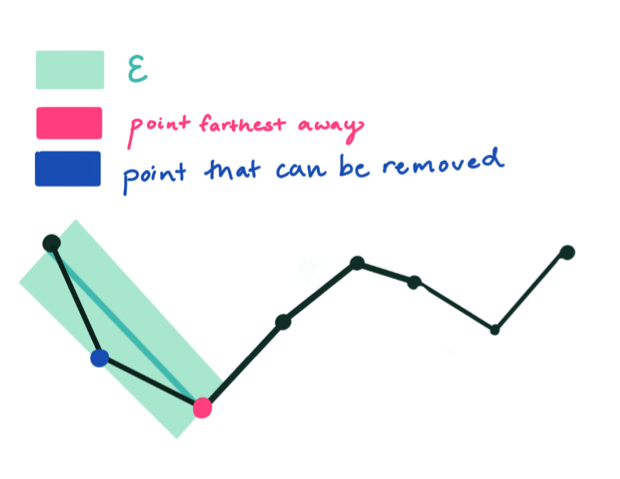
// Ifmax distance is greater than epsilon, recursively simplify if (dmax > epsilon) { // Recursivecall recResults1[] = DouglasPeucker(PointList[1...index], epsilon) recResults2[] = DouglasPeucker(PointList[index...end], epsilon)
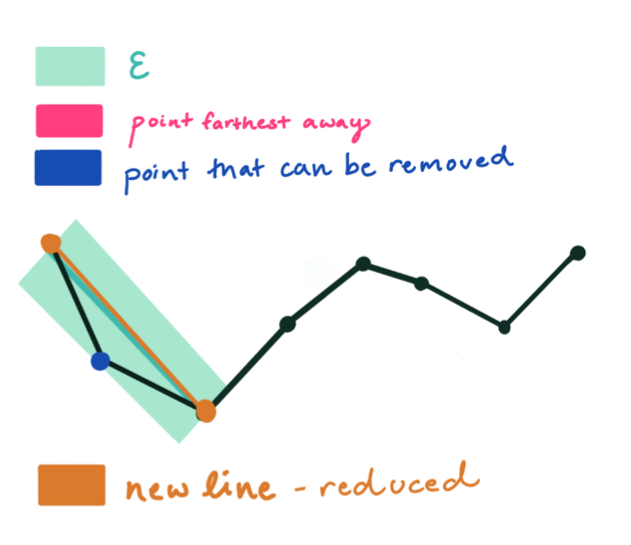
// Build the result list ResultList[] = {recResults1[1...length(recResults1) - 1], recResults2[1...length(recResults2)]} } else { ResultList[] = {PointList[1], PointList[end]} } // Return the result return ResultList[] end