本文记录 Ubuntu 下 opencv C++ 环境配置,以 4.7.0 为例。
基础流程
- 下载 opencv 源码
- 安装相关依赖
- 源码编译、安装
- 配置环境
具体配置
以 opencv 4.7.0 版本为例
基础工具
1
2
3
| sudo apt install cmake
sudo apt install g++
sudo apt install make
|
资源下载
opencv 源码下载
opencv 拓展库 contrib 源码下载
解压两个源码包,将 contrib 放到 opencv 文件夹内
新建 build 文件夹
1
2
3
| unzip opencv_*
mv opencv_contrib-4.7.0/ opencv-4.7.0/
cd opencv-4.7.0 && mkdir build && cd build
|
安装依赖库
可以根据需要选择安装
1
2
3
4
5
6
7
8
| sudo apt-get install build-essential
sudo apt-get install python-numpy python3-numpy python-pandas python3-pandas
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff5-dev libdc1394-22-dev
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev liblapacke-dev
sudo apt-get install libxvidcore-dev libx264-dev # 处理视频所需的包
sudo apt-get install libatlas-base-dev gfortran # 优化opencv功能
sudo apt-get install ffmpeg
|
编译安装
1
2
3
4
5
| cd build/
cmake -D CMAKE_INSTALL_PREFIX=/usr/local -D CMAKE_BUILD_TYPE=build -D OPENCV_EXTRA_MODULES_PATH=../opencv_contrib-4.7.0/modules/ ..
(缺资源就下载复制到.cache中)
make -j8
sudo make install
|
OPENCV_EXTRA_MODULES_PATH 指 contrib 相对路径
环境配置
1
2
3
| sudo vim /etc/ld.so.conf
增加一行: usr/local/lib
sudo ldconfig
|
1
2
| include /etc/ld.so.conf.d/*.conf
usr/local/lib
|
在环境变量中添加:
1
| export PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
|
对于 opencv 4
1
| sudo ln -s /usr/local/include/opencv4/opencv2/ /usr/local/include/
|
测试运行
源码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
| //test_opencv.cpp
#include <opencv2/core.hpp>
#include <opencv2/imgcodecs.hpp>
#include <opencv2/highgui.hpp>#include <iostream> using namespace cv;
//! [includes] int main()
{
//! [imread]
std::string image_path = "/home/vvd/VVD/lab/cpp-opencv-test/test.png";//samples::findFile("starry_night.jpg")"";
Mat img = imread(image_path, IMREAD_COLOR);
//! [imread] //! [empty]
if(img.empty())
{
std::cout << "Could not read the image: " << image_path << std::endl;
return 1;
}
//! [empty] //! [imshow]
imshow("Display window", img);
int k = waitKey(0); // Wait for a keystroke in the window
//! [imshow] //! [imsave]
if(k == 's')
{
imwrite("starry_night.png", img);
}
//! [imsave] return 0;
}
|
测试图像:

源码中 image_path 改成自己的图像路径
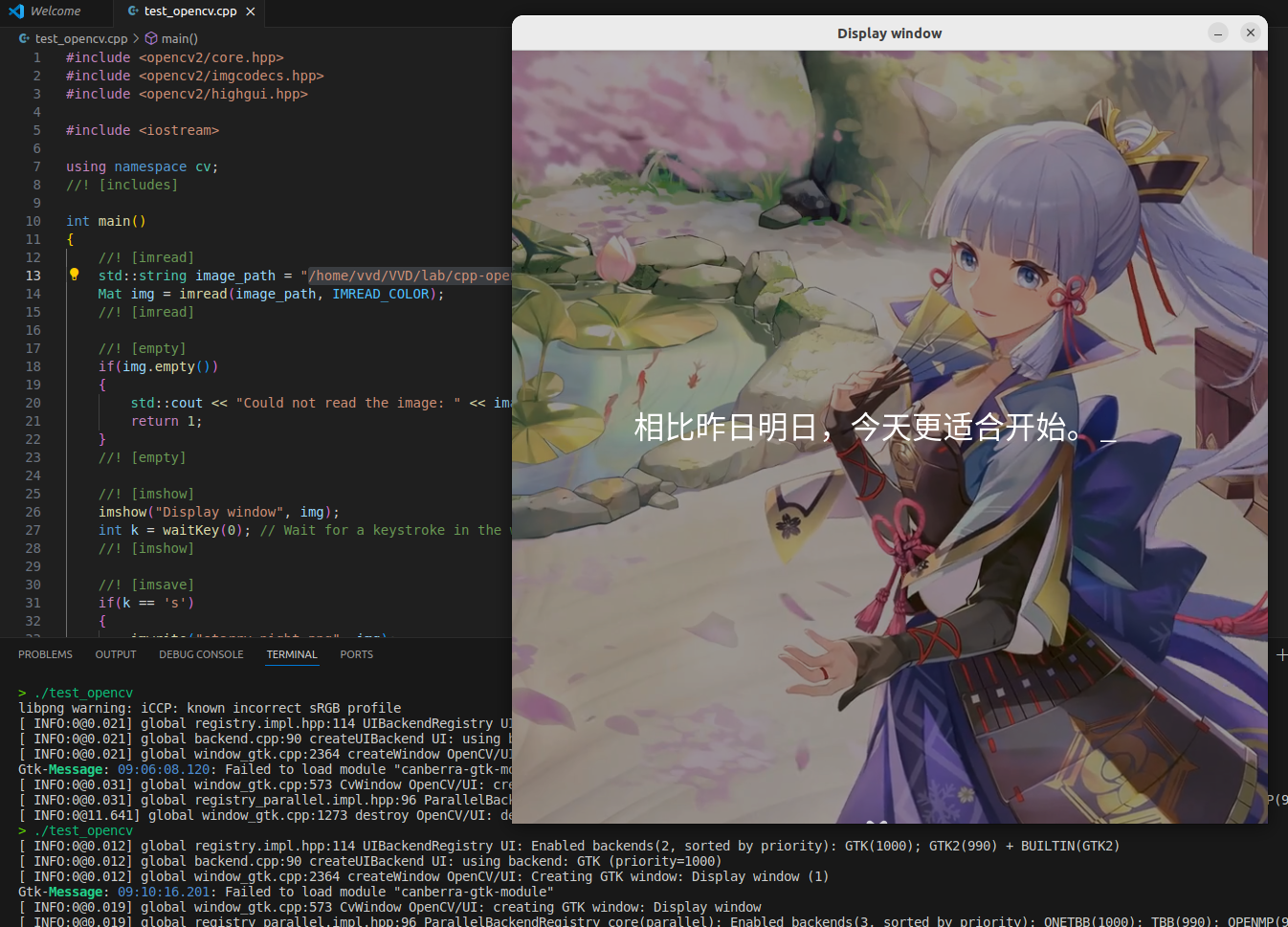
命令行编译
1
| g++ -o test_opencv test_opencv.cpp -L /usr/local/lib/ -lopencv_core -lopencv_highgui -lopencv_imgcodecs
|
执行可执行文件
实现效果
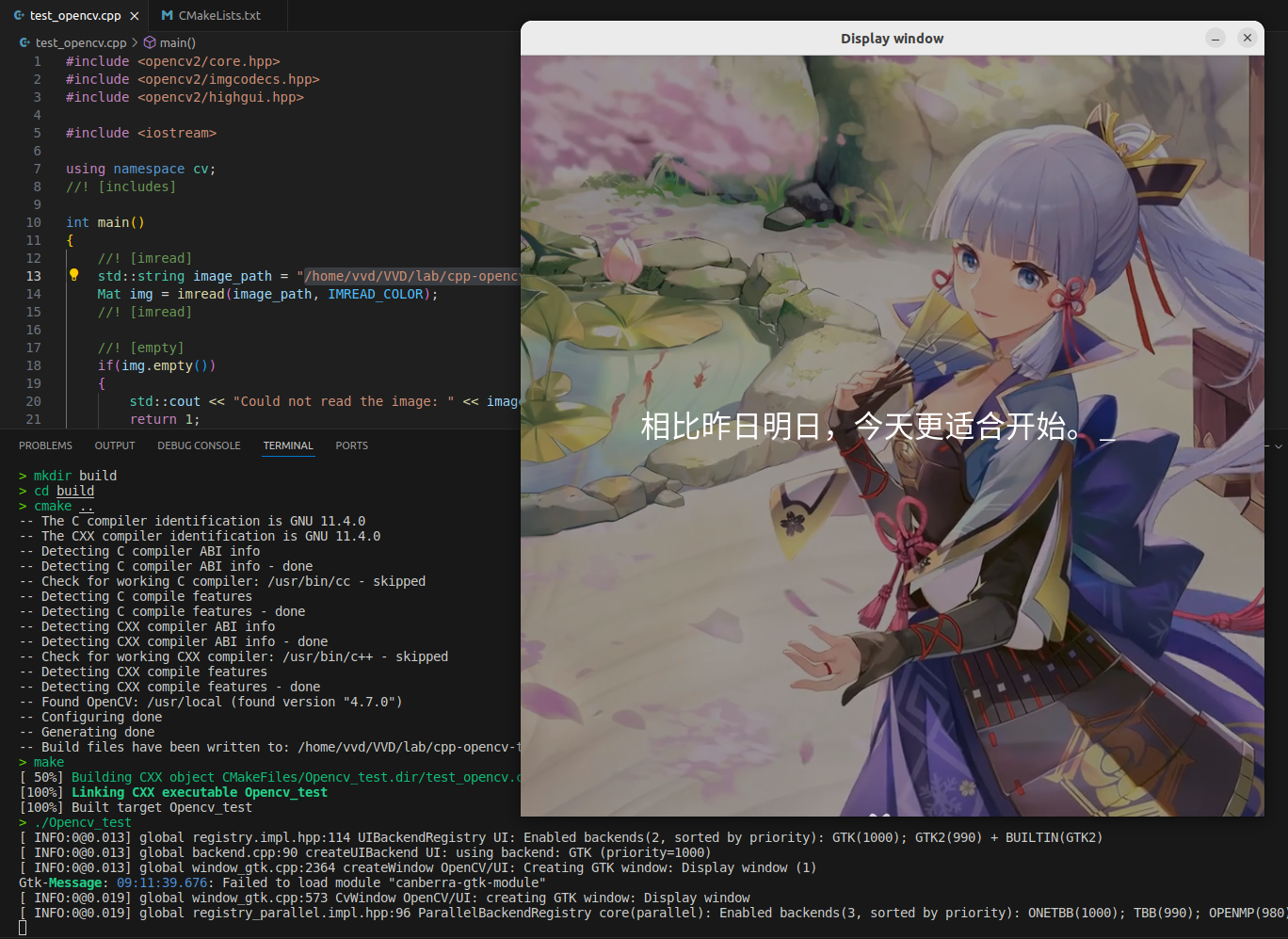
Cmake 编译
创建 CMakeLists.txt 文件,放在 test_opencv.cpp 文件旁边
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| #cmake needs this line
cmake_minimum_required(VERSION 3.1)#Define project name
project(Opencv_test) #Find OpenCV, you may need to set OpenCV_DIR variable
find_package(OpenCV REQUIRED) #Enable C++11
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED TRUE) #Declare the executable target built from your sources
add_executable(Opencv_test test_opencv.cpp) #Link your application with OpenCV libraries
target_link_libraries(Opencv_test PRIVATE ${OpenCV_LIBS})
|

在该文件夹下执行命令
1
2
3
4
| mkdir build && cd build
cmake ..
make
./Opencv_test
|
执行效果
参考资料
文章链接:
https://www.zywvvd.com/notes/coding/cpp/ubuntu-cpp-opencv47/ubuntu-cpp-opencv47/