地理信息系统中有高程的概念,本文记录相关内容。
在描述这几个高程概念之前,先抛出几个基准面的定义。

大地水准面是最接近地球整体形状的重力位水准面,也是正高系统的高程基准面。由静止海水面并向大陆延伸所形成的不规则的封闭曲面。它是重力等位面,即物体沿该面运动时,重力不做功(如水在这个面上是不会流动的)。大地水准面是指与全球平均海平面(或静止海水面)相重合的水准面。大地水准面是描述地球形状的一个重要物理参考面,也是海拔高程系统的起算面。大地水准面的确定是通过确定它与参考椭球面的间距-大地水准面差距(对于似大地水准面而言,则称为高程异常)来实现的。
似大地水准面(quasi-geoid)是正常高的起算面,指从地面点沿正常重力线按正常高相反方向量取到正常高端点所构成的曲面。是前苏联地球物理学家、测量学家莫洛金斯基研究地球形状理论时,为避免大地水准面无法精确确定而引进的辅助面,为一与大地水准面十分接近、在海洋上两者完全重合、而在大陆上有2~4米的微小差异的曲面。由于正高与大地水准面的确定涉及到地球内部密度的假定,在理论上存在着不严密性,莫洛金斯理论作为现代大地测量里程碑,可以应用地面测量数据直接确定地球表面形状而不需要对地球密度作任何假设,在这一理论体系中所构建的正常高系统,习惯上将所谓的似大地水准面称为该系统的高程起算面。然而,似大地水准面只是通过一定的数学关系对应于地面的一个几何曲面,它既不是具有物理意义的水准面,也不是对于所有空间各点都为唯一的高程起算面。
从地面点沿正常重力线量取正常高所得端点构成的封闭曲面。似大地水准面严格说不是水准面,但接近于水准面,只是用于计算的辅助面。它与大地水准面不完全吻合,差值为正常高与正高之差。但在海洋面上时,似大地水准面与大地水准面重合。
建立一个高精度、三维、动态、多功能的国家空间坐标基准框架、国家高程基准框架、国家重力基准框架,以及由GPS、水准、重力等综合技术精化的高精度、高分辨率似大地水准面。该框架工程的建成,将为基础测绘、数字中国地理空间基础框架、区域沉降监测、环境预报与防灾减灾、国防建设、海洋科学、气象预报、地学研究、交通、水利、电力等多学科研究与应用提供必要的测绘服务,具有重大的科学意义。
精化大地水准面对于测绘工作有重要意义:首先,大地水准面或似大地水准面是获取地理空间信息的高程基准面。其次,GPS(全球定位系统)技术结合高精度高分辨率大地水准面模型,可以取代传统的水淮测量方法测定正高或正常高,真正实现GPS技术对几何和物理意义上的三维定位功能。再次,在现今GPS定位时代,精化区域性大地水准面和建立新一代传统的国家或区域性高程控制网同等重要,也是一个国家或地区建立现代高程基准的主要任务,以此满足国家经济建设和测绘科学技术的发展以及相关地学研究的需要。近年来,我国经济发达地区及中、小城市,在地形图测绘方面,对厘米级似大地水准面的需求十分迫切。高精度的似大地水准面结合GPS定位技术所获得的三维坐标中的大地高分离求解正常高,可以改变传统高程测量作业模式,满足1:1万、1:5000甚至更大比例尺测图的迫切需要,加快数字中国、数字区域、数字城市等的建设,不但节约大量人力物力,产生巨大的经济效益,而且具有特别重要的科学意义和社会效益。
大地高等于正常高与高程异常之和,GPS测定的是大地高,要求解正常高必须先知道高程异常。在局部GPS网中巳知一些点 的高程异常(它由GPS水准算得), 考虑地球重力场模型,利用多面函数拟合法求定其它点的高程异常和正常高。
大地高和海拔高的定义中隐含了两个关于地球形状概念——大地水准面和参考椭球面(体)。
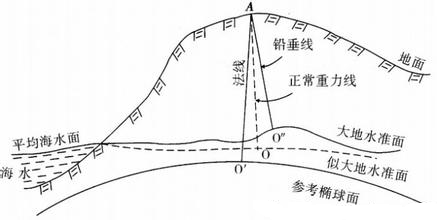
地球不规则,这是众所周知的。怎么刻画地球的形状呢?首先需要确定的是“大地水准面”。他是在地球重力作用下,假设静止的海面向陆地和岛屿延伸,形成一个封闭的面。这个面就是大地水准面。大地水准面是一个重力等位面。可以认为物体如果在这个面上运动、发生位移,重力是不做功的。显然大地水准面所包裹的空间也并非一个规则的球体(见上图)。有的书上还描述说,大地水准面所包裹的球体像一个梨。虽然不尽准确,但是可以由此联想,这个球体肯定是凹凸不平的。
为了地图制图的方便,人们设计出“旋转椭球体”这个概念来拟合大地水准面所包围的不规则球体(联想一下地球仪)。旋转椭球体由长半轴、短半轴、扁率共同定义。截至目前人们已经发展了多个不同的旋转椭球体。比如克拉索夫斯基椭球体、1975年IUGG推荐的椭球体、美国WGS84椭球体等。数学法则定义的椭球体通常是整体上对地球大地水准面拟合较好。实际应用中还有一个放置的问题,即各国可能考虑让这个椭球体处于一个特定位置而实现对该国范围内的地表面拟合最优。比如上图中,红色虚线是大地水准面,紫色实线是椭球面。这个椭球面在全球、以及图中“法线”二字对应的局部区域拟合都很好,但是对“大地水准面”5个字所在区域拟合就不好。目前美国人似乎很有点世界情怀,他们所使用的WGS84大地坐标系,力图让其WGS84椭球体在全球范围内整体拟合最优。而我们国家此前的1980西安大地坐标系(我国现行的地形图主要是这个坐标系),还是尽量让椭球体对我国大陆地区地表拟合最优。毕竟我们国家陆地区域起伏太大。
处理大地测量成果而采用的与地球大小、形状接近并进行定位椭球体表面。参考椭球面是测量、计算的基准面。地球体从整体上看,十分接近于一个规则的旋转椭球体。地球椭球由三个椭球元素:长半轴,短半轴和扁率表示。形状、大小一定且已经与大地体作了最佳拟合的地球椭球称为参考椭球。我国的最佳拟合点,也称为大地原点,位于陕西省西安市泾阳县永乐镇。各国为处理大地测量的成果,往往根据本国及其他国家的天文、大地、重力测量结果采用适合本国的椭球参数并将其定位。
我国在成立之前采用海福特椭球参数,新中国成立之初采用克拉索夫斯基椭球参数(其大地原点在前苏联,对我国密合不好,越往南方误差越大)。目前采用的是1975年国际大地测量学与物理学联合会(IUGG)推荐的椭球,在我国称为“1980年国家大地坐标系”。坐标原点即是前面提到的“陕西省咸阳市泾阳县永乐镇”。2008年7月1日我国启动了2000国家大地坐标系,计划用8~10年完成现行国家大地坐标系到2000国家大地坐标系的过渡与转换工作。
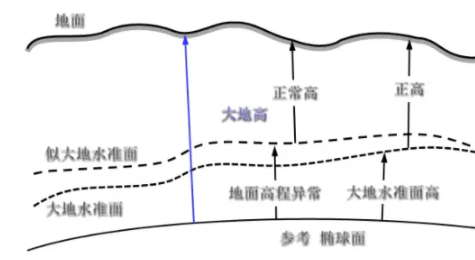
大地高:地面点沿椭球面的法线到椭球面的距离;
正高:地面点沿铅垂线到大地水准面垂直距离;
正常高:是沿铅垂线到似大地面的垂直距离;
高程是地理学和测量学中对地物高度的一种表达。英文的表达是elevation。与高程相关的两个概念——大地高与海拔高,在实践上有差异,但很容易混淆。
王慧麟等编著的《测量与地图学》(南大出版社,2004年)中对这两个概念有明确表述:
点位沿椭球面的法线至椭球面的高度称“大地高”;
点位沿铅垂线至大地水准面的高度称海拔高,也称作“正高”。
在实践中,地形图上标出的高度是海拔高,GPS读出的高度是大地高。
海拔高 分为 正高与正常高。
地球表面上某点沿铅锤方向到大地水准面上的高程叫做正高,可以说是我们平常理解的海拔。
然而这个大地水准面跟重力有关系,重力又不那么均匀,所以经常很难精确测量到,因此搞了个近似大地水准面的 似大地水准面。
沿铅锤方向到似大地水准面的高度叫做正常高,我国目前采用的法定高程系统就是正常高系统。
大地水准面差距(geoid undulation)是从大地水准面上的点沿地球椭球法线到地球椭球的距离。
高程异常是似大地水准面与参考椭球面之间的高差。
大地高=正高+大地水准面差距;
大地高=正常高+高程异常。
大疆中采用的高程为:
文章链接:
https://www.zywvvd.com/notes/study/gis/height-define/height-define/
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。