💡 站外导读:随着人工智能从数字世界向物理世界深入渗透,具身智能(Embodied AI)正成为下一个前沿爆发点。然而,当前大多数机器人模型仍受限于特定任务和“干净”数据,泛化能力弱、适应真实复杂环境成本高昂。如何让机器人像人一样,在多样、开放的环境中快速学习并执行多种任务,是产业界亟需突破的核心痛点。千寻智能推出的Spirit-v1.5具身智能基础模型,正试图从根本上解决这一挑战,其技术路径可能重塑机器人的学习与部署范式。
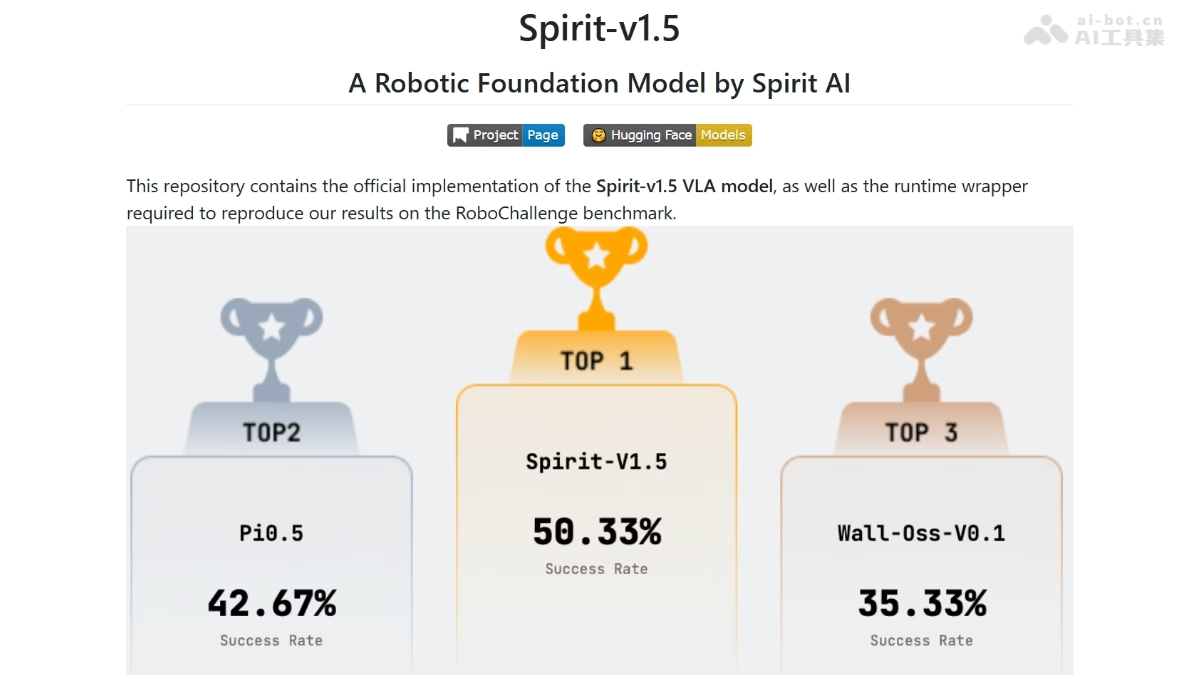
Spirit-v1.5 是千寻智能推出的具身智能基础模型。模型采用多样化、开放式的数据采集方式,摒弃传统“干净数据”的限制,让模型在预训练阶段接触更丰富的动作和场景,具备更强的泛化能力和适应性。在 RoboChallenge 真机评测中,Spirit-v1.5 凭借出色的表现超越此前的领先模型,成为当前最优的具身智能模型,为具身智能的发展提供新的技术路径和开源基准。
多样化任务执行:Spirit-v1.5能完成多种日常任务,如插花、水果入篮、挂牙刷杯、贴胶带、清扫垃圾等。
泛化能力:通过多样化的预训练数据,具备在未见过的场景中快速适应和执行任务的能力。
鲁棒性:在复杂环境中表现出色,能应对物体遮挡、光照变化、机械臂协同等挑战。
支持多机器人平台:模型兼容多种机器人硬件,如单臂机器人(Franka、UR5e)和双臂机器人(ALOHA)。
高效微调:在新任务上能快速微调,减少训练时间和资源消耗。
多样化数据采集:模型摒弃传统“干净数据”,采用开放式、弱控制的数据采集方式。采集员围绕任务目标自由行动,生成包含多种原子技能和真实时序关系的数据。
预训练与微调:模型通过大规模多样化数据进行预训练,学习通用策略而非单一任务的最优解。在新任务上微调时,模型能够快速适应并表现出色。
Vision-Language-Action (VLA) 模型架构:结合视觉、语言和动作模块,使机器人能理解自然语言指令、感知环境和执行相应动作。
强化学习与自监督学习:模型用强化学习优化任务成功率,同时通过自监督学习提升模型对环境变化的适应能力。
家庭服务:Spirit-v1.5 可协助完成家务劳动,如清洁桌面、整理物品、辅助烹饪等,显著提升家庭生活的便利性和效率。
工业自动化:模型适用生产线操作、质量检测及物流仓储,通过高效执行任务,提高工业生产的效率和精准度。
医疗辅助:在康复训练、医疗物资管理和手术辅助等方面,Spirit-v1.5 能优化医疗流程,为医护人员提供有力支持。
教育与研究:作为科研和教学工具,Spirit-v1.5 助力学术研究和教育普及,推动机器人技术与人工智能的教育发展。
零售与服务:在店铺管理、客户服务和库存管理中,Spirit-v1.5 能提升零售运营效率,改善顾客体验。
农业与园艺:Spirit-v1.5 可用于农作物管理和园艺护理,助力农业生产与园艺维护,提高作业效率。
Spirit-v1.5的发布,标志着具身智能正从‘专用技能’向‘通用基础模型’阶段的关键跨越。其摒弃‘干净数据’依赖,采用开放式数据采集的思路,是构建机器人‘世界模型’的重要范式转移,与当前大语言模型追求数据多样性的趋势一脉相承。更值得关注的是其VLA(Vision-Language-Action)架构的落地,这打通了感知、决策与执行的全链路,是构建通用机器人智能的核心骨架。结合其在多硬件平台上的泛化表现,我们看到的不仅是单一模型的进步,更是一个潜在的、标准化机器人开发生态的雏形。未来,谁能率先在真实世界的长尾、非结构化场景中实现低成本适配,谁就将主导下一代机器人产业。Spirit-v1.5的开源,无疑为这场竞赛提供了新的基准和加速度。
此内容由惯性聚合(RSS阅读器)自动聚合整理,仅供阅读参考。 原文来自 — 版权归原作者所有。